
 手机网站
手机网站
手机网站
手机网站
运动学描述的是机器人末端和各个关节位置的几何关系。而动力学描述的是关节位置和力矩之间的力学关系。 机器人控制从全局上我们可以讲电机力矩作为输入,末端位置作为

机器人运动学
892x533 - 55KB - PNG

基于运动学原理的可穿戴下肢助力机器人 - 21I
531x558 - 38KB - JPEG
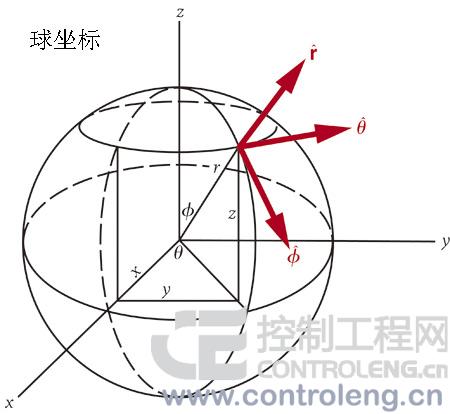
机器人控制系统运动学方程 - 控制工程网
450x414 - 24KB - JPEG

基于运动学原理的可穿戴下肢助力机器人 - 可穿
531x558 - 38KB - JPEG

线驱动连续型机器人的运动学分析与仿真(一)_
434x183 - 11KB - JPEG

机器人学-第三章机器人运动学正解
1080x810 - 128KB - JPEG

机器人操作臂运动学入门一--D-H参数标定 - 山
674x459 - 39KB - JPEG

机器人操作臂运动学入门一--D-H参数标定 - 山
402x412 - 20KB - JPEG
.jpg)
3-PCR并联机器人机构的运动学分析
509x395 - 29KB - JPEG

机器人运动学求解及实现_UG 基础-设计在线网
554x566 - 81KB - JPEG
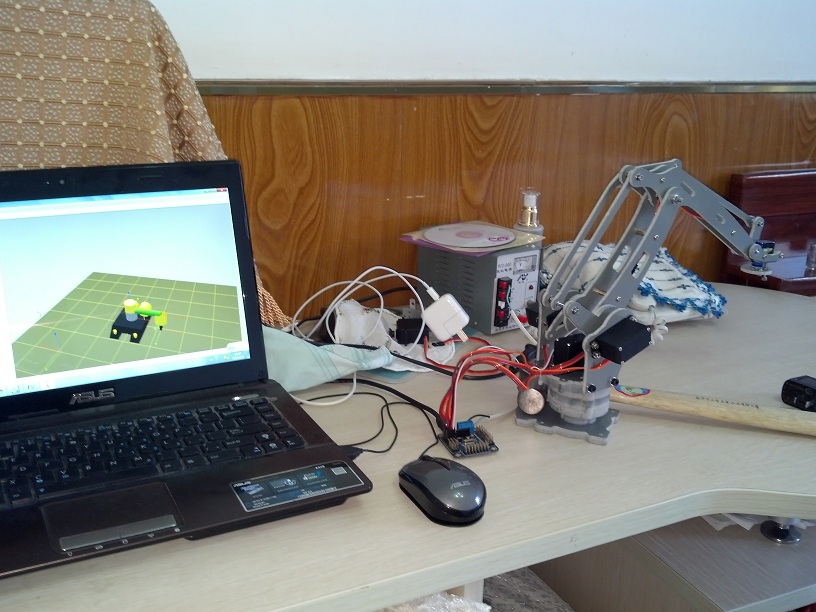
机械臂式机器人运动学仿真与控制软件系统,ar
816x612 - 155KB - JPEG
仿生学:偷师大自然(组图)
400x228 - 81KB - JPEG

机器人运动学_不同D-H矩阵的对比
679x494 - 52KB - PNG

《机器人运动学在线标定技术\/人机共融技术系
350x350 - 9KB - JPEG
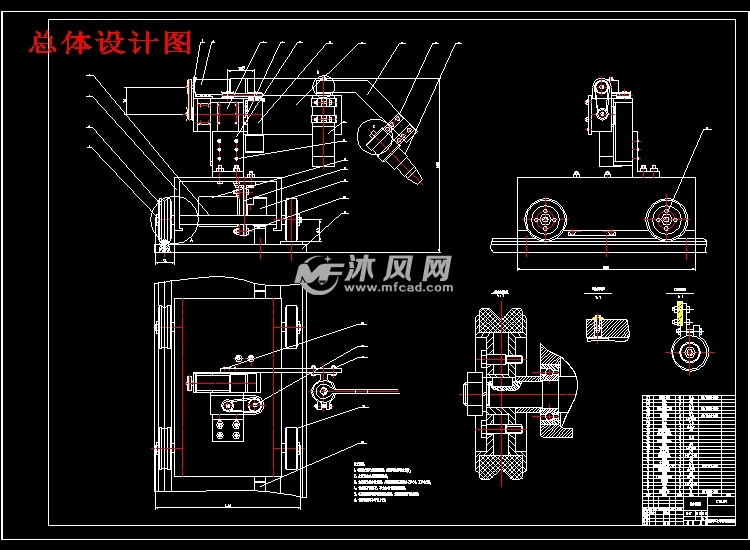
集装箱波纹板焊接机器人机构运动学分析及车体
750x550 - 147KB - JPEG
