
 手机网站
手机网站
手机网站
手机网站
批准号 51575157 学科分类 机器人机械学 ( E050103 ) 负责人 张建华 职称 单位名称 河北工业大学 资助金额 65万元 项目类别 起止年月 2016年01月01日至 2019年12月31日

柔性屏对人机交互方式带来的改变
600x399 - 28KB - JPEG

直线柔性伺服机构图 - proe常用机械机构
900x578 - 328KB - PNG

直线柔性伺服机构图 - proe常用机械机构
900x399 - 265KB - PNG

【柔性机构动态可靠性分析图片】高清图_外观
800x800 - 88KB - JPEG

前沿科技:柔性机构的发展前景是怎样?
380x285 - 23KB - JPEG

柔性伺服驱动机构模型 - proe弹簧螺旋类模型下
865x550 - 49KB - PNG

柔性伺服驱动机构模型 - proe弹簧螺旋类模型下
759x593 - 49KB - PNG

空间傅里叶变换红外光谱仪用全柔性机构的设计
394x492 - 27KB - JPEG
.jpg)
基于柔性铰链机构的谐振式微加速度计设计制作
438x512 - 33KB - JPEG
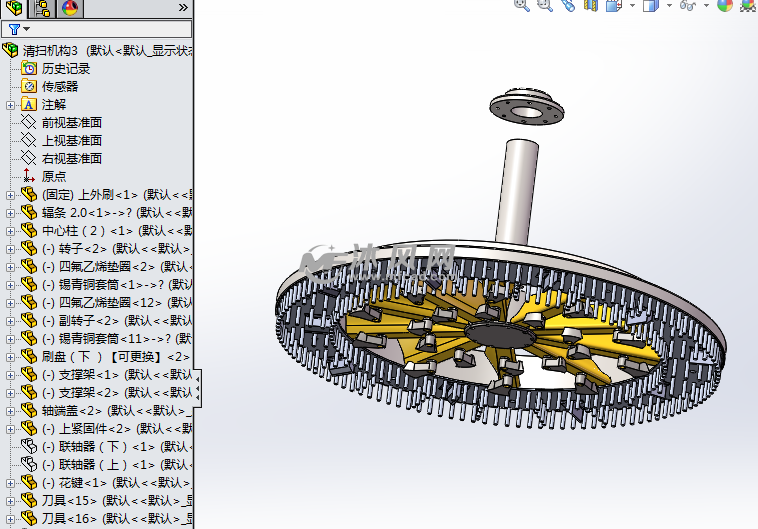
旋转式柔性清扫机构 - solidworks机械设备模型
758x529 - 254KB - PNG

前沿科技:柔性机构的发展前景是怎样?
580x748 - 69KB - JPEG

最新柔性传感器技术不断完善 人机交互将更加
500x278 - 26KB - JPEG

前沿科技:柔性机构的发展前景是怎样?
500x557 - 21KB - JPEG

【模块化工装板传送线输送机柔性转弯机构 自
800x800 - 276KB - JPEG

基于柔性铰链机构的谐振式微加速度计设计
380x212 - 13KB - JPEG
