
 手机网站
手机网站
手机网站
手机网站
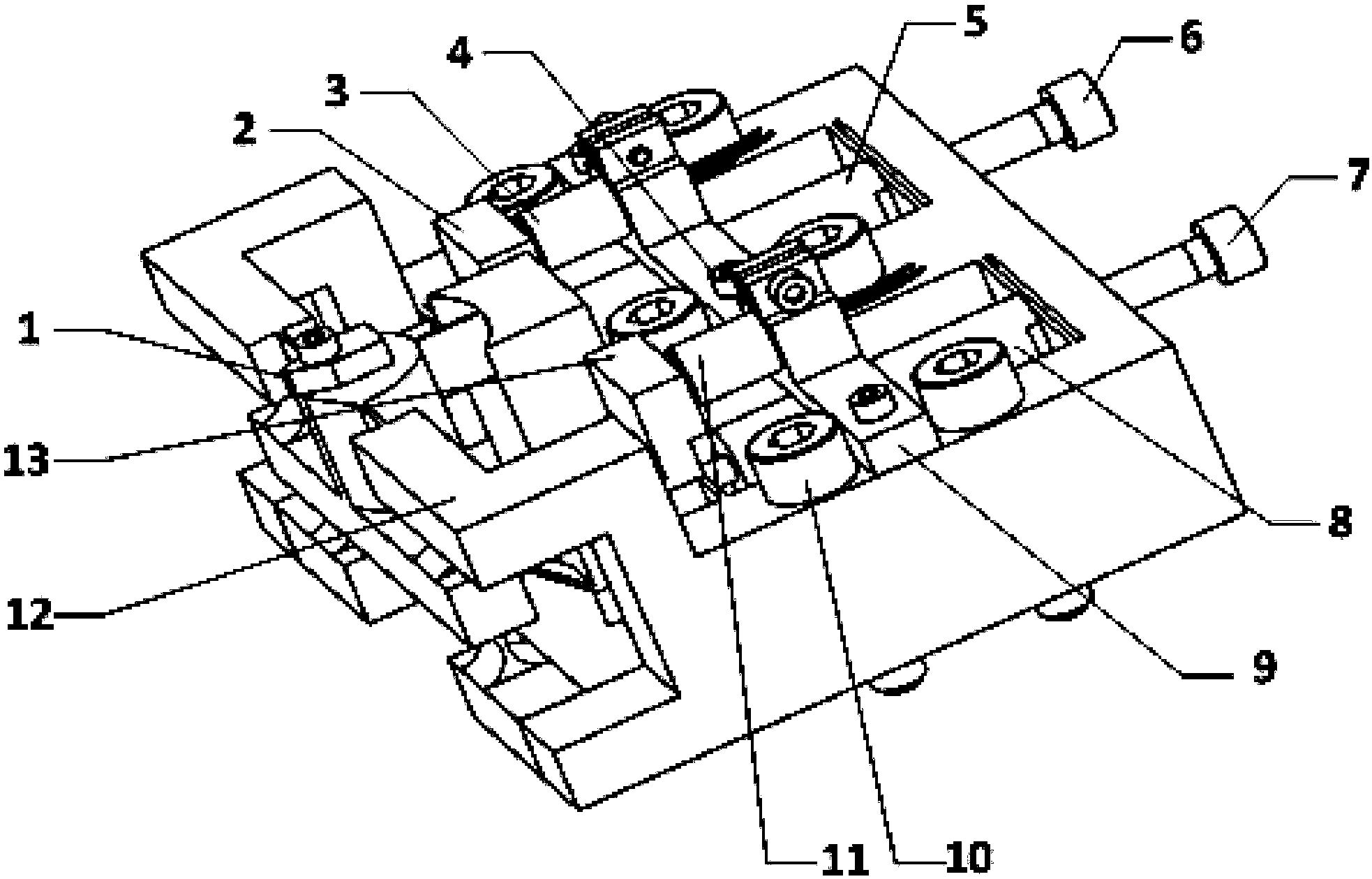
2结构组成图1和图2分别为三支链六自由度并联微动机器人CAD图和结构示意图。三条固定长度的支杆连接动平台和底座。支杆下端采用柔性球铰链,上端采用单轴旋转柔性图

基于柔性铰链的热驱动微夹钳的实验和仿真分析
408x332 - 16KB - JPEG
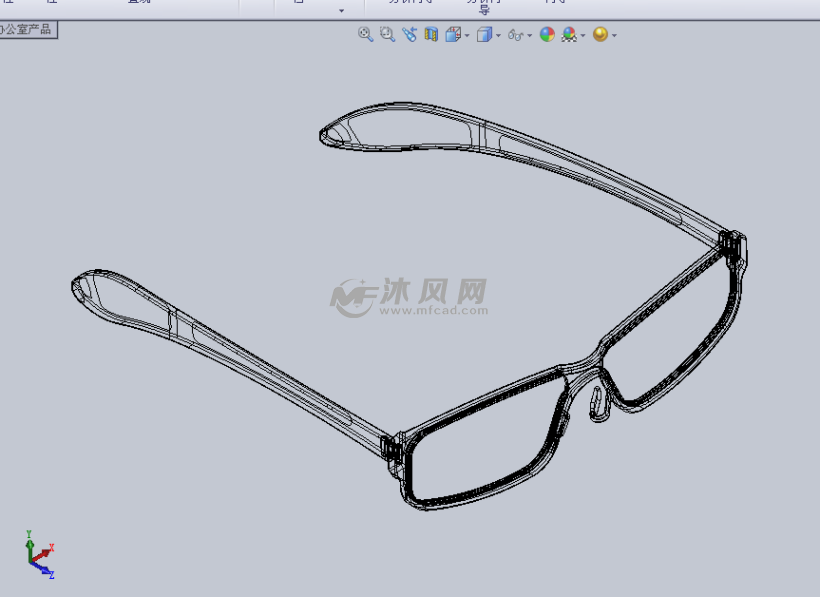
带柔性铰链的眼镜设计模型 - solidworks生活用
863x628 - 48KB - PNG
.jpg)
大口径超轻型反射镜定位和支撑方案研究
411x306 - 22KB - JPEG
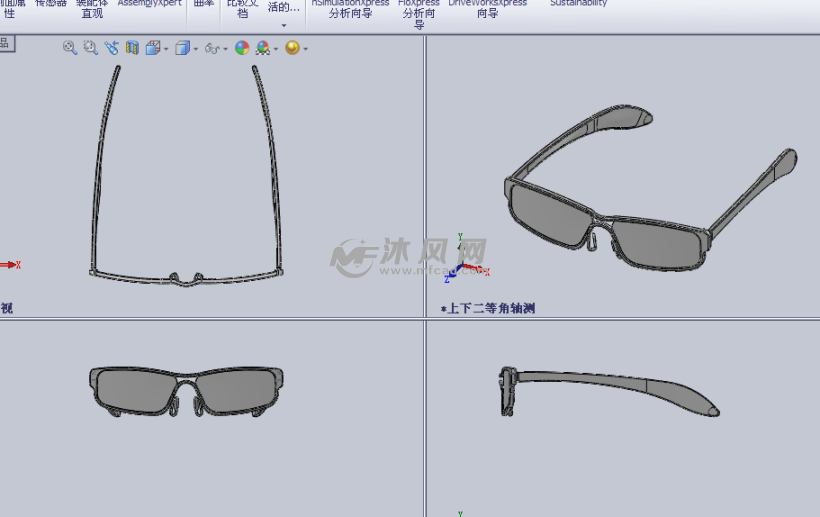
带柔性铰链的眼镜设计模型 - solidworks生活用
911x574 - 96KB - PNG
.jpg)
基于柔性铰链机构的谐振式微加速度计设计制作
438x512 - 33KB - JPEG

基于柔性铰链的热驱动微夹钳的实验和仿真分析
527x244 - 26KB - JPEG
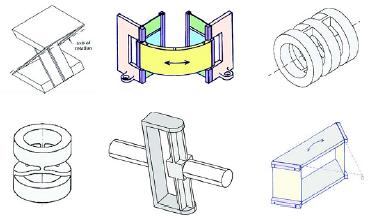
柔性铰链特性介绍,功能分类
387x219 - 15KB - JPEG

压电陶瓷与柔性铰链采用螺钉联结
290x289 - 17KB - JPEG

基于柔性铰链结构的三维模拟测头设计_word文
1508x2097 - 1201KB - PNG
一种基于锐角直板型柔性铰链的振动辅助旋转切
1966x1259 - 276KB - JPEG

指向机构微调平台的结构设计与分析
450x259 - 20KB - JPEG

基于柔性铰链结构的二维微动工作台研究
954x1402 - 715KB - PNG

弹性结构小巧铰链SC-622-1柔性屏手机铰链浙
800x742 - 84KB - JPEG
.jpg)
单自由度微位移机构柔性铰链的研究
485x1029 - 74KB - JPEG
.jpg)
单自由度微位移机构柔性铰链的研究
334x690 - 43KB - JPEG
