
 手机网站
手机网站
手机网站
手机网站
随着电子技术、自动化控制和计算机应用的发展,台式机器人的运动控制不断向着高精度、高速度、微型化、智能化和通用化方向发展。目前,以数字信号处理器(DSP)和现场可

智能搬运机器人运动控制算法实现与路径规划实
993x1404 - 103KB - PNG

轮式足球机器人运动控制算法应用研究与实现.
800x1131 - 39KB - PNG

模糊PID的全方位移动机器人运动控制
600x541 - 37KB - JPEG

足球机器人运动控制算法研究
876x1176 - 31KB - PNG

基于人体运动预测的外骨骼机器人控制算法研究
800x1131 - 112KB - PNG

两轮足球机器人设计及运动控制算法的研究-精
800x1182 - 254KB - PNG

关于并联机器人运动控制仿真的多线程研究_w
500x242 - 8KB - PNG

TwinCAT平台的SCARA机器人运动控制算法研
800x1131 - 57KB - PNG
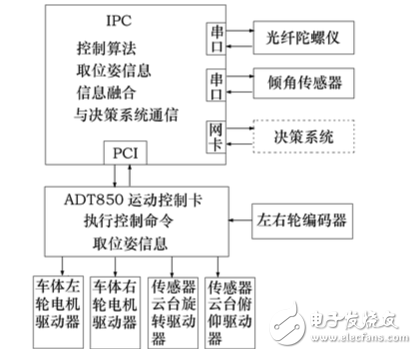
基于ADT850的机器人运动控制系统设计方案 -
417x354 - 67KB - PNG

机器人室内运动轨迹修正控制算法
671x673 - 48KB - PNG

机器人运动控制算法工程师
1063x1060 - 37KB - JPEG

机器人运动控制算法工程师
2480x2477 - 145KB - JPEG

中国3C电子智造行业最值得关注的机器人厂商
321x464 - 43KB - PNG

油气管道检测机器人避障运动控制算法研究_参
802x1173 - 113KB - JPEG
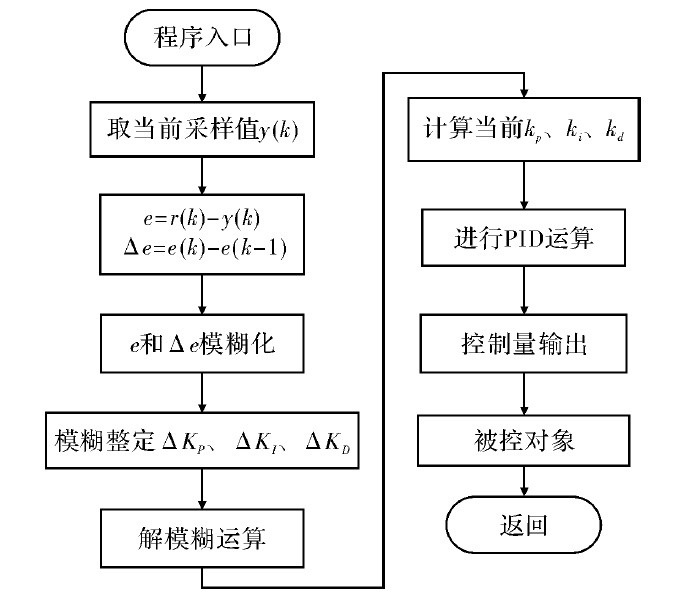
基于模糊PID的全方位移动机器人运动控制(3\/3
676x610 - 60KB - JPEG
