
 手机网站
手机网站
手机网站
手机网站

如图所示为平面内的两旋转关节机械手,已知机
341x299 - 22KB - PNG

如图所示为平面内的两旋转关节机械手,已知机
407x297 - 12KB - PNG
基于DSP仿人机器人关节控制器设计 - 嵌入式系
910x523 - 82KB - JPEG

基于DSP仿人机器人关节控制器设计 - 21IC中国
910x523 - 78KB - JPEG

基于DSP仿人机器人关节控制器设计 -DSP
455x262 - 32KB - JPEG

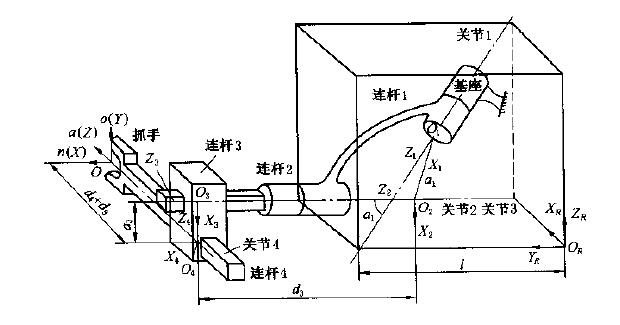
运动学杆件的几何参数及关节变量
570x253 - 17KB - JPEG

机器人模块化关节控制算法及其综合性能测试平
800x1168 - 472KB - PNG

基于DSP仿人机器人关节控制器设计 - 电子综合
548x312 - 81KB - JPEG

基于dsp仿人机器人关节控制器设计
455x262 - 22KB - JPEG
运动学杆件的几何参数及关节变量
620x325 - 27KB - JPEG

基于DSP仿人机器人关节控制器设计-电子电路
910x523 - 78KB - JPEG

代理CSG-14-80-2A-GR哈默纳科机器人手腕关
581x536 - 84KB - JPEG

lm628在工业机器人伺服驱动中的应用_运动伺
386x473 - 41KB - JPEG

龙之传奇模糊变量AI+BOSS对抗不是大战机器
348x296 - 13KB - JPEG
了解科技的发展进步,对机器人控制系统的一般
600x511 - 35KB - JPEG
感觉你说的不是很对 耦合性可以指状态变量互相牵连,也可以指一个控制变量与多个状态变量有牵连。
为机器人的个关节角变量 为正运动学算出来的位姿 是通过逆解求出的关节变量值。如果仿真结果正确 的值应该
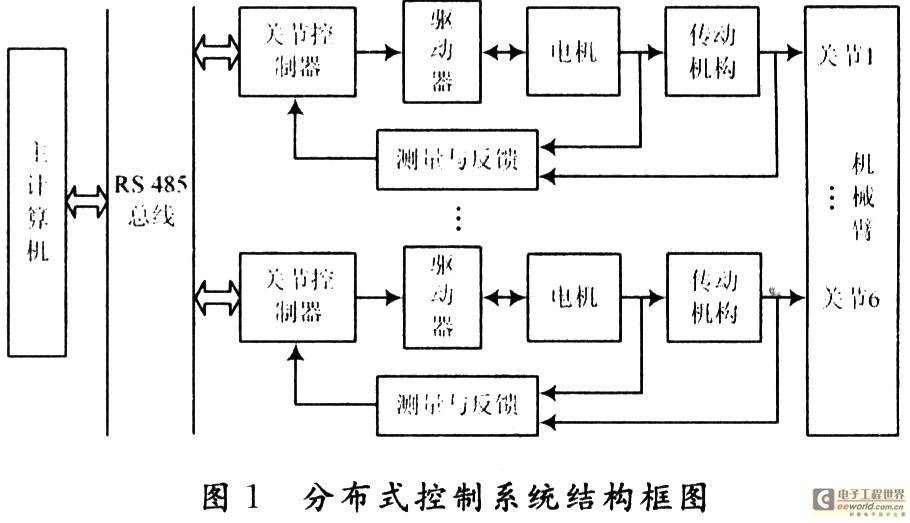
3结论 机器人控制的基础是机器人的位置控制,要求控制系统的计算机计算机器人的一系列关节变量,从而 控制
机器人运动学包括正向运动学和逆向运动学,正向运动学即给定机器人各关节变量,计算机器人末端的位置姿态;
机器人关节变量的多微机并行算法算法,关节,并行,机器人,机器人的,微机机器人,并行算法,关节变量,机器人算法
机器人杆件的几何参数与关节变量与机器人关系到机器人的运动,是非常重要的知识点,下面一起来看看吧。
矩阵的关系建立起机器人的运动方程K#LJ&J$J"J@JMJ#:A&B 机器人逆运动学就是逆解运动方程 求出各关节变量 左
冗余度机器人关节变量的滑模变结构控制研究,冗余度;滑模变结构;鲁棒性;动力学,倪受东,罗翔,文巨峰,颜景平
Stanford机器人逆解关节变量新方法,机器人;逆运动学;关节汇交,赵轲,广东石油化工学院学报杂志。在D-H-M
