
 手机网站
手机网站
手机网站
手机网站
管道修补机器人设计 :采用直流电机驱动蜗轮蜗杆机构作为动力源,弹簧被动适应管壁,设计出一种适用于内径50-70mm变半径细小管道的修补机器人,机器人具有机构灵活度高,机

管道机器人设计图纸_管道机器人设计图纸图片
800x533 - 23KB - JPEG

管道机器人设计图纸_管道机器人设计图纸图片
514x422 - 21KB - JPEG

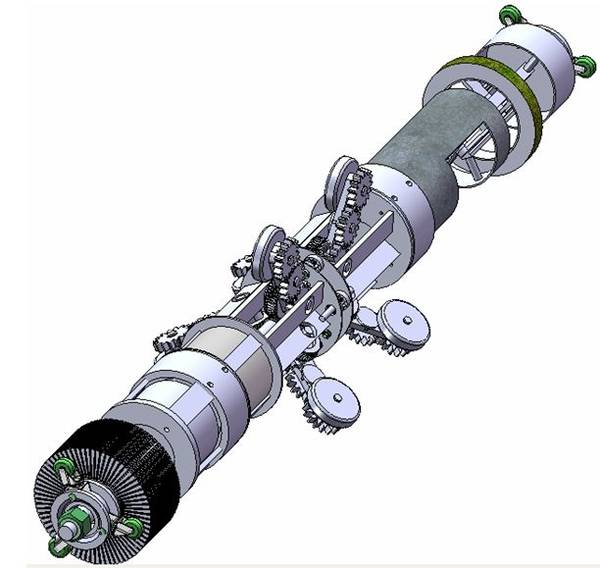
燃气管道机器人系统结构设计
617x540 - 66KB - JPEG

供应其他分析仪器_其他分析仪器生产商和制造
402x303 - 12KB - JPEG

管道机器人设计图纸_管道机器人设计图纸图片
800x600 - 41KB - JPEG
管道机器人设计图纸_管道机器人设计图纸图片
600x568 - 34KB - JPEG

基于SolidWorks的管道除垢机器人设计与实现
321x204 - 12KB - JPEG

管道机器人设计图纸_管道机器人设计图纸图片
1024x768 - 279KB - JPEG

流量能操作的管道检测机器人设计模型 - solidw
2500x1200 - 535KB - JPEG

武汉中仪物联技术有限公司的cctv管道机器人\/c
579x415 - 54KB - JPEG

管道检测机器人设计模型 - ProE玩具公仔类模
3000x1874 - 1167KB - JPEG

工业机器人批发_工业机器人供应_工业机器人
432x303 - 159KB - PNG

管道机器人(catia)设计模型 - catia机械设备
1879x896 - 50KB - JPEG

大学生设计出机器人管道工(图)_校园新闻
500x363 - 40KB - JPEG

管道机器人施罗德singa300管道机器人图片,管
494x394 - 28KB - JPEG
