
 手机网站
手机网站
手机网站
手机网站
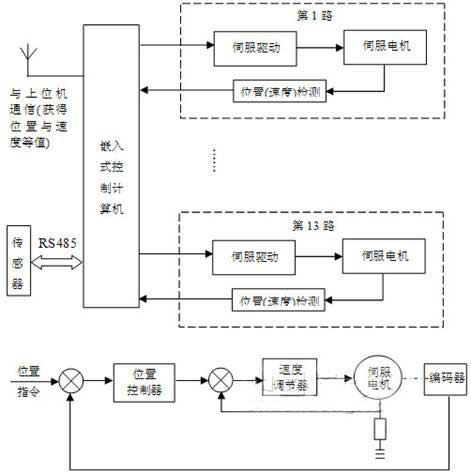
机器人控制原理和系统设计引言钵苗移栽是温室穴盘育苗生产中的重要环节,人工作业单调繁重,正逐步被机械化移栽设备所取代。早期钵苗移栽设备的研究多以工业机器人为本

嵌入式移动机器人控制器设计
396x356 - 38KB - JPEG

焊接机器人控制器的研发_ai汽车网_弗戈工业在
400x246 - 22KB - JPEG

多功能机器人的原理及应用概述_工业自动化_
666x359 - 50KB - PNG

发那科焊接机器人控制系统原理及应用分析
536x447 - 44KB - JPEG
自动控制原理图
471x473 - 21KB - JPEG

自动化PLC机器人电气控制原理接线图 - AutoC
580x491 - 160KB - JPEG

自动化PLC机器人电气控制原理接线图_cad图
610x432 - 36KB - JPEG

哪位知道六足爬虫机器人控制系统电路图的详细
500x440 - 30KB - JPEG
工业机器人控制器-工业机器人控制器原理-工业
460x399 - 56KB - JPEG

fanuc焊接机器人控制系统应用分析-中国传动网
500x402 - 41KB - JPEG
吸尘机器人控制系统电路设计 -电路图天天读(4
931x612 - 73KB - JPEG

轮式机器人控制系统设计-电子电路图,电子技术
440x260 - 32KB - JPEG

小型移动机器人的控制系统-电子电路图,电子技
341x354 - 29KB - JPEG
自动化PLC机器人电气控制原理接线图 - AutoC
900x320 - 67KB - JPEG
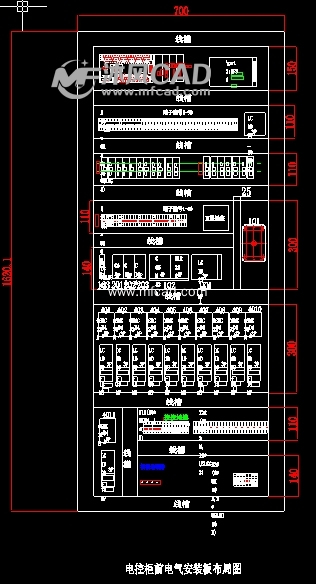
自动化PLC机器人电气控制原理接线图 - AutoC
316x584 - 129KB - JPEG
