
 手机网站
手机网站
手机网站
手机网站
北航机器人技术运动学作业 你可能关注的文档: 1、矩阵代表齐次坐标变换,求其中的未 机器人的执行机构实际上是一个多刚体系统,在研究机器人的运动过程中,首先要涉及到

厉害了!北航研发可穿戴外骨骼机器人,有望商业
600x276 - 34KB - JPEG

高校双创聚焦机器人研发
400x224 - 82KB - JPEG

具有局部自由度的冗余度机器人优化控制研讨.
800x1168 - 360KB - PNG

1、机器人-简版技术总结.ppt
960x720 - 37KB - JPEG

MJR码垛机器人结构设计与工作空间分析研究.
800x1168 - 324KB - PNG

北京航空航天大学文力教授应邀为我校学子作报
4896x3264 - 3832KB - JPEG

机器人日报来了(2017年8月4日)
461x288 - 28KB - JPEG

机器人运动学
892x533 - 55KB - PNG

机器人学-第三章机器人运动学正解
1080x810 - 128KB - JPEG

第一章机器人运动学2.ppt
1152x864 - 245KB - PNG

双足机器人逆运动学的模糊自适应算法_word文
1449x2086 - 880KB - PNG
平面五杆并联机器人运动学导论下载 - Rain.ne
598x889 - 58KB - JPEG

利用matlab建立两轮移动机器人的运动学模型,
603x319 - 94KB - JPEG
集装箱波纹板焊接机器人机构运动学分析及车体
750x550 - 109KB - JPEG
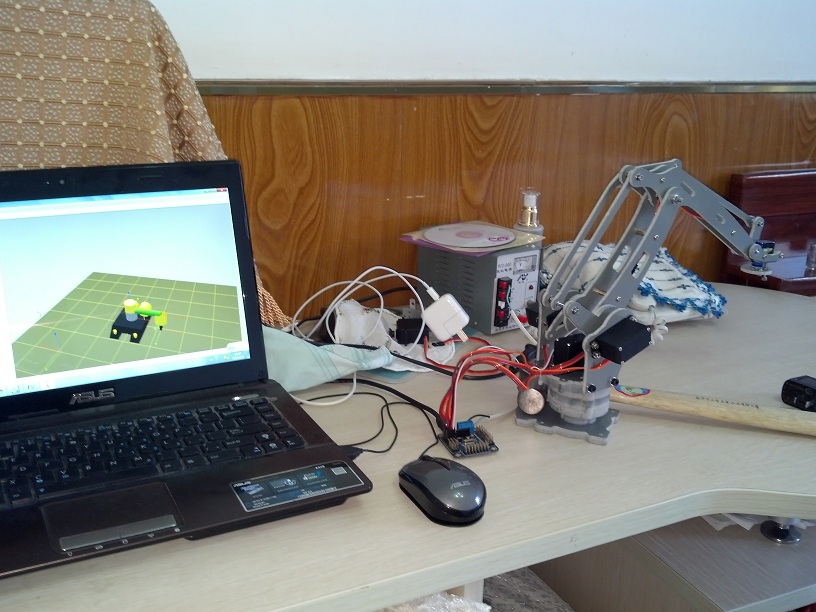
机械臂式机器人运动学仿真与控制软件系统,ar
816x612 - 155KB - JPEG
