
 手机网站
手机网站
手机网站
手机网站
摘要:智能车周围车辆目标参数(位姿、运动速度和几何形状)对智能车路径规划和决策算法而言至关重要.选取三维激光雷达作为传感器,对车辆目标位置、航向角、速度和几何形
【奔驰智能驾驶系统 S级轿车的第六感_泉州之
620x291 - 33KB - JPEG
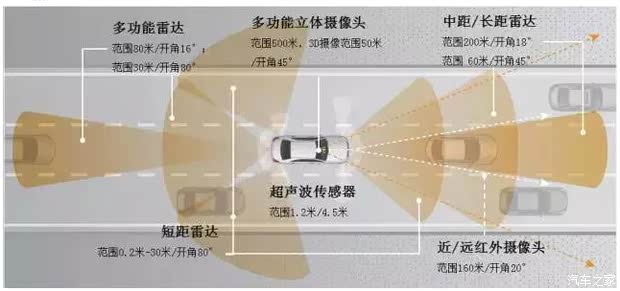
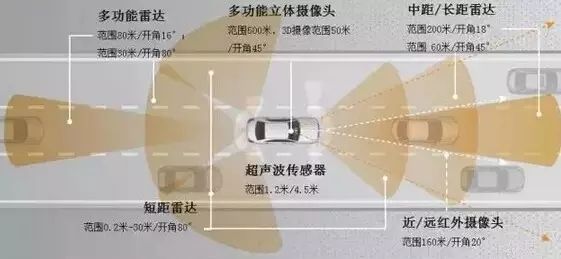
奔驰智能驾驶系统 S级轿车的第六感
553x254 - 16KB - JPEG

【奔驰智能驾驶系统 S级轿车的第六感_利星行
620x320 - 23KB - JPEG

【奔驰智能驾驶系统 S级轿车的第六感_娄底宝
620x282 - 32KB - JPEG
奔驰智能驾驶系统 奔驰S级轿车的第六感
561x259 - 78KB - JPEG

绍兴之星带你领略奔驰S级轿车的智能驾驶系统
500x230 - 129KB - PNG

【图】奔驰智能驾驶系统 S级轿车的第六感
620x285 - 32KB - JPEG

【图】奔驰智能驾驶系统 S级轿车的第六感
620x327 - 27KB - JPEG

【图】奔驰智能驾驶系统 S级轿车的第六感
620x297 - 21KB - JPEG

奔驰智能驾驶系统 S级轿车的第六感
550x330 - 20KB - JPEG

全新S级轿车的第六感:梅赛德斯-奔驰智能驾驶
500x267 - 13KB - JPEG

无人驾驶谁最niu?中国智能汽车大赛在汽车创新
407x305 - 18KB - JPEG

【荣誉】我校学生在省高校第十二届大学生物理
764x586 - 243KB - JPEG

跨界达人 吉利全球鹰GX2试驾体验(组图)
550x366 - 31KB - JPEG
