
 手机网站
手机网站
手机网站
手机网站
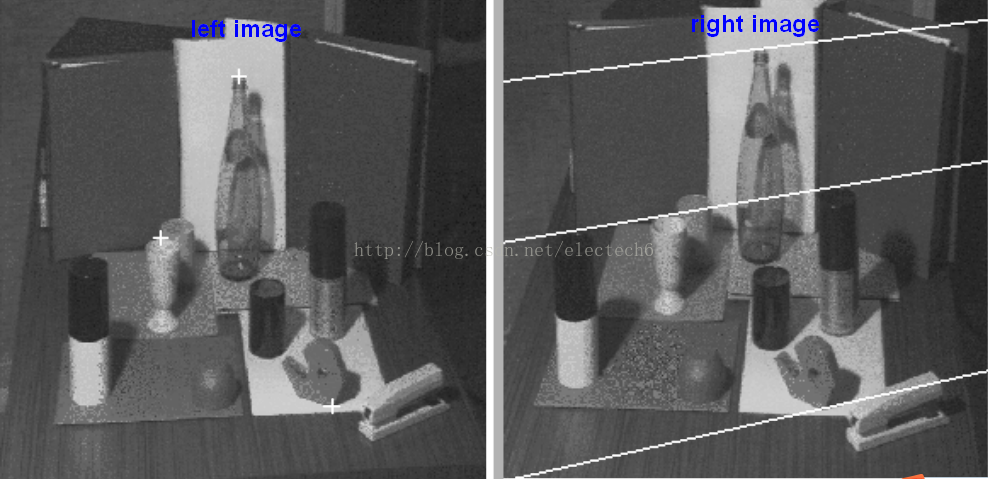
由双目立体视觉系统原理可以看出双目立体视觉是建立在对应点的视差基础之上, 因此 左右图像中各点的匹配关系成为双目立体视觉技术的一个极其重要的问题。 然而, 对于实

Fusiello_epipolarrectification 对立体视觉的双目
768x576 - 40KB - JPEG

fusiello_epipolarrectification 对立体视觉的双目
768x576 - 42KB - JPEG

fusiello_epipolarrectification 对立体视觉的双目
768x576 - 39KB - JPEG
深度相机---(3)双目立体视觉
988x479 - 331KB - PNG

深度相机原理揭秘--双目立体视觉
612x378 - 36KB - PNG

opencv 双目视觉 OpenCV+OpenGL 双目立体视
379x353 - 523KB - PNG

双目立体视觉.ppt
1152x864 - 299KB - PNG

基于立体视觉和激光扫描的无人机自主导航场景
800x1131 - 206KB - PNG

双目立体视觉系统机器之眼之扬帆起航篇
1018x501 - 468KB - PNG

双目立体视觉入门
837x400 - 135KB - PNG
深度相机原理揭秘--双目立体视觉
628x379 - 18KB - JPEG
基于双目视觉的手术器械跟踪定位技术
458x469 - 43KB - JPEG

无需标定的极线矫正
280x220 - 2KB - PNG

基于图割理论的立体匹配算法研究-计算机科学
800x1257 - 279KB - PNG
计算机视觉论文速递
1080x457 - 49KB - JPEG
