
 手机网站
手机网站
手机网站
手机网站
【摘要】:基于零极点对消技术 ,提出柔性机械臂的前馈延时控制 ,得到了零极点对消应满足的条件 ,对不同工况、不同材质的柔性臂做了一系列系统的前馈延时控制及比较实验
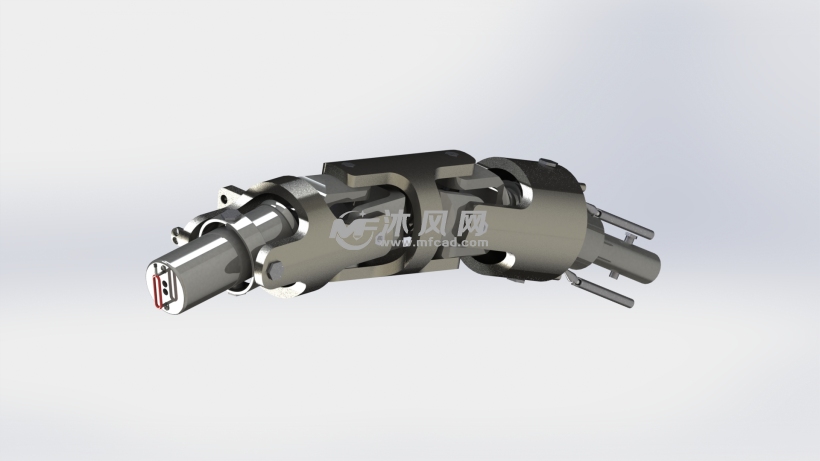
柔性机械臂 - solidworks机械设备模型下载
820x461 - 81KB - JPEG
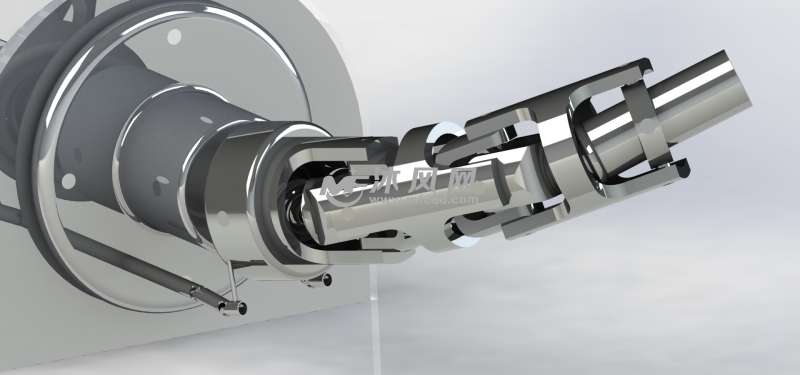
柔性机械臂
800x375 - 117KB - JPEG

(high-flex) high flexible Cable 中文:高柔性电缆、
310x232 - 13KB - JPEG

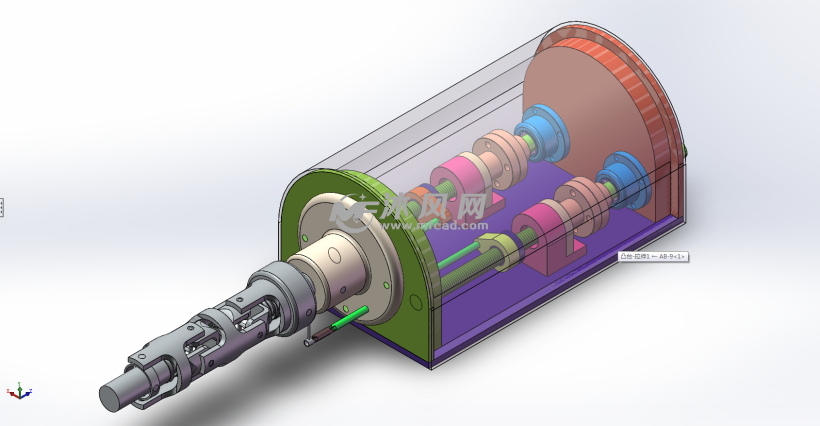
柔性机械臂
800x450 - 80KB - JPEG

ET手臂:多自由度柔性仿象鼻机械臂
680x381 - 81KB - JPEG

医疗辅助机器人(七轴柔性机械臂)
800x390 - 164KB - JPEG
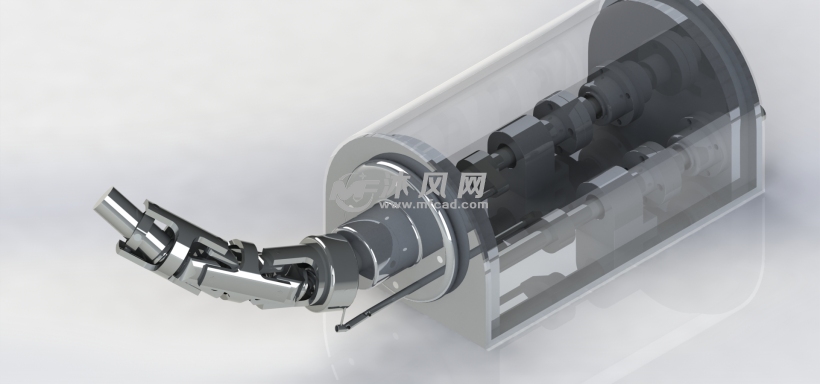
柔性机械臂 - solidworks机械设备模型下载
820x426 - 248KB - PNG

大学生设计多自由度柔性仿象鼻机械臂已申请
400x204 - 12KB - JPEG

柔性机械臂
648x500 - 114KB - PNG
柔性机械臂 - solidworks机械设备模型下载
820x384 - 100KB - JPEG

医疗辅助机器人(七轴柔性机械臂)
800x390 - 44KB - JPEG

ET手臂:多自由度柔性仿象鼻机械臂
460x334 - 16KB - JPEG
柔性机械臂 - solidworks机械设备模型下载
820x384 - 90KB - JPEG

柔性智能空间机械臂振动主动控制机制研究.pd
800x1050 - 76KB - PNG

他们想让机械手臂帮你家做家务 - OFweek智能
600x339 - 25KB - JPEG
