
 手机网站
手机网站
手机网站
手机网站
机器人学-第5章机器人控制算法(4) zhao2010zcl|2018-06-30 |举报 共享文档 共享文档是百度文库用户免费上传的可与其他用户免费共享的文档,具体共享方式由上传人自由设定
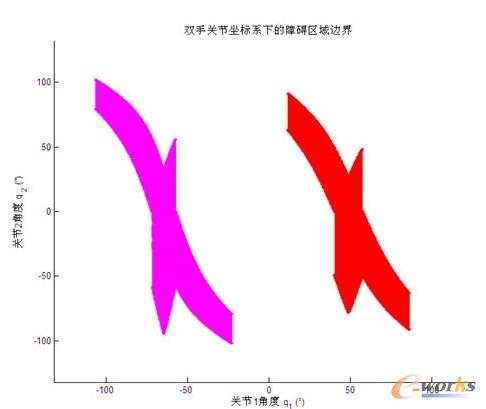
SCARA机器人二维避障的智能控制算法与仿真
486x409 - 14KB - JPEG
基于一级倒立摆模型仿人机器人控制算法研究-
338x452 - 74KB - JPEG
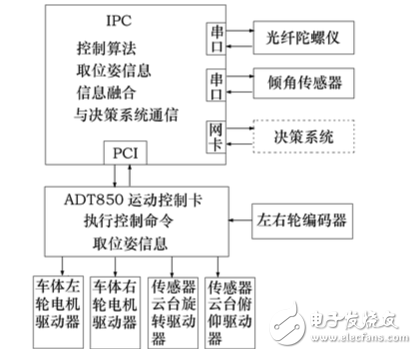
基于ADT850的机器人运动控制系统设计方案 -
417x354 - 67KB - PNG

钢铁侠从硬件和控制算法切入打造双足机器人A
724x1024 - 51KB - JPEG

基于负压吸附的轮式玻窗清洁机器人
415x322 - 29KB - JPEG

模糊PID的全方位移动机器人运动控制
600x541 - 37KB - JPEG

轮腿式机器人控制系统及姿态算法设计与实验_
932x2000 - 480KB - PNG

串联机器人轨迹跟踪控制模糊自适应PID算法的
353x270 - 46KB - JPEG

智能搬运机器人运动控制算法实现与路径规划实
993x1404 - 103KB - PNG

PUMA机器人轨迹跟踪控制算法仿真研究.pdf
800x1095 - 54KB - PNG
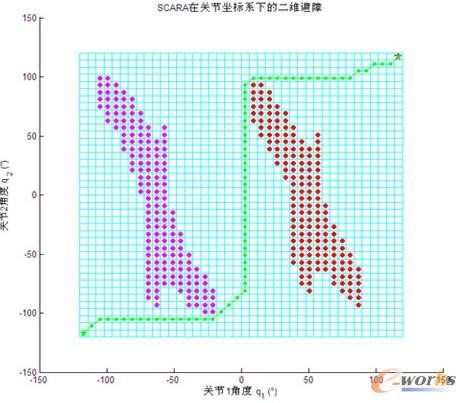
SCARA机器人二维避障的智能控制算法与仿真
466x403 - 35KB - JPEG

《机器人学、机器视觉与控制:MATLAB算法基
350x350 - 15KB - JPEG

基于一级倒立摆模型仿人机器人控制算法研究-
327x453 - 71KB - JPEG

资讯中心
520x367 - 50KB - JPEG

不同型号双焊接机器人协调控制
750x579 - 75KB - JPEG
