
 手机网站
手机网站
手机网站
手机网站
8.工业机器人的运动控制主要是实现点位运动( PTP )和连续路径运动(C P )两种。当机器人进行 CP运动控制时,末端执行器既要保证运动的起点和目标点位姿,而且必须保证

工业机器人技术习题答案.pdf分析.doc
794x1123 - 19KB - PNG

第6讲机器人控制2要点分析.ppt
1152x864 - 70KB - PNG

工业机器人技术习题答案.pdf解读.doc
141x200 - 6KB - PNG

第五节机器人轨迹规划.ppt
1152x864 - 188KB - PNG

机器人复习题
267x263 - 6KB - JPEG
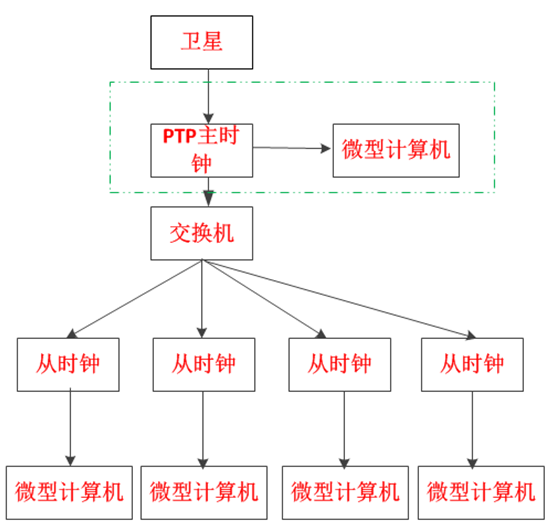
GPS标准时钟系统对机器人系统的同步解决方
551x526 - 53KB - PNG

FANU机器人提高焊接作业的经济性
300x200 - 15KB - JPEG

ptp仿真测试软件_机器人仿真软件_单片机仿真
1600x900 - 181KB - JPEG

dlfa-ptp气动机器人实训装置
818x802 - 84KB - JPEG

ptp仿真测试软件_机器人仿真软件_单片机仿真
1920x1080 - 152KB - JPEG

ptp仿真测试软件_机器人仿真软件_单片机仿真
800x600 - 173KB - JPEG

ptp仿真测试软件_机器人仿真软件_单片机仿真
550x309 - 21KB - JPEG

ptp仿真测试软件_机器人仿真软件_单片机仿真
530x241 - 30KB - JPEG

库卡机器人常见运动指令
522x341 - 17KB - JPEG
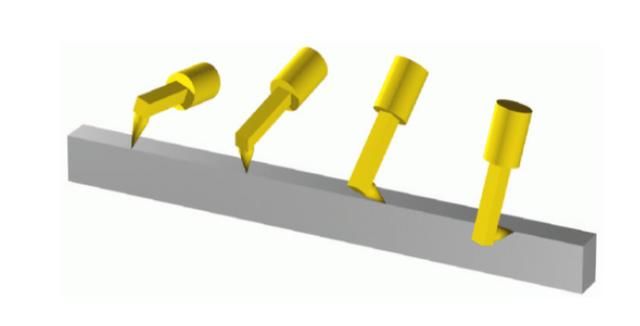
工业机器人沿轨迹的运动时的姿态引导
640x326 - 9KB - JPEG
