
 手机网站
手机网站
手机网站
手机网站
SCARA机器人结构设计与运动模拟摘要:标系原点位姿误差矩阵,要计算末端执行器位姿误差,必须右乘一个工具坐标系t相对第n个关节坐标系的变换矩阵 ,因为末端执行器坐标系

基于数值模拟技术的SCARA机器人本体设计与
886x656 - 129KB - PNG

基于数值模拟技术的SCARA机器人本体设计与
1016x643 - 274KB - PNG

【机器人在线】SCARA机器人运动学仿真分析
600x480 - 361KB - PNG

毕业设计 球面SCARA机器人总体及控制系统设
200x200 - 10KB - JPEG

【机器人在线】SCARA机械结构参数计算说明
265x340 - 39KB - PNG

scara机器人图纸_scara机器人图纸图片分享
800x524 - 18KB - JPEG
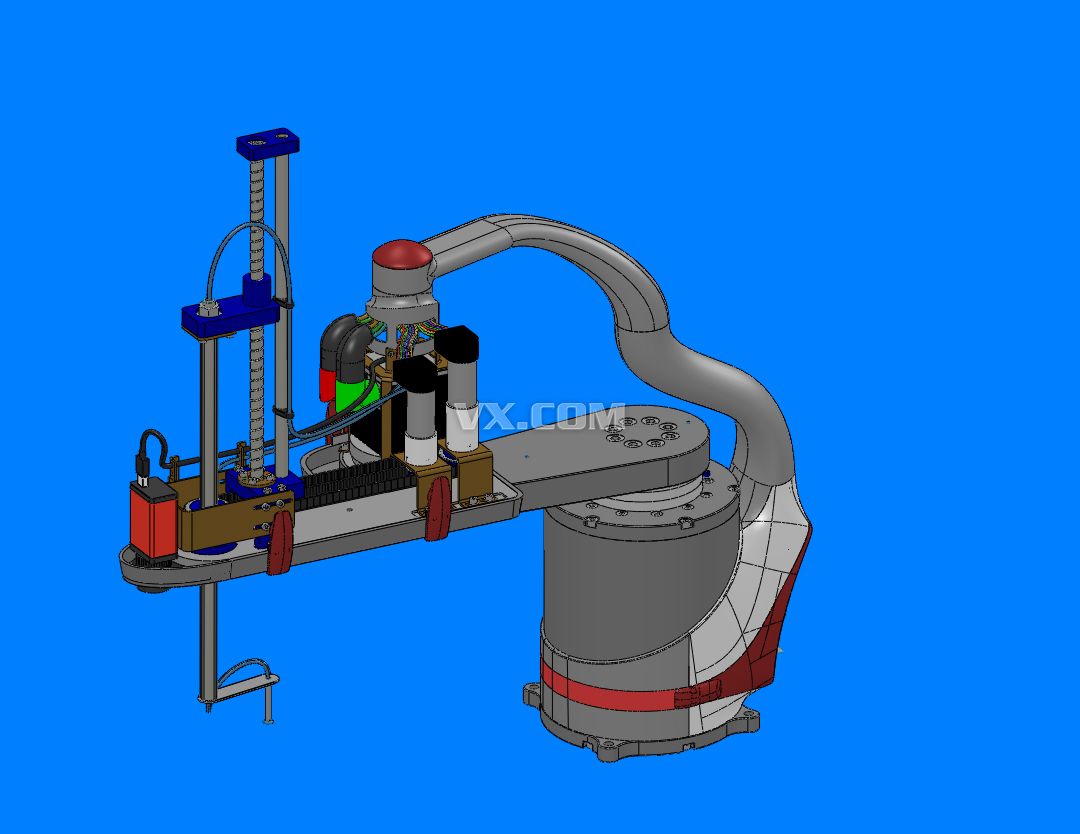
scara机器人机构图
1080x834 - 70KB - JPEG

scara机器人图纸_scara机器人图纸图片分享
800x533 - 22KB - JPEG

RB002 机器人关节SCARA机器人 - solidworks
520x551 - 90KB - PNG

上海电梯行业协会
621x424 - 306KB - PNG

SCARA机器人专用丝杆花键一体轴-SCARA机
800x533 - 131KB - JPEG

电装vs6556e SCARA机器人模板下载(图片编号
605x353 - 95KB - PNG

【单臂机器人】单臂机器人价格_单臂机器人批
1308x1100 - 378KB - PNG

史陶比尔携最新TS80+SCARA机器人亮相200
1283x962 - 89KB - JPEG

经济型四自由度SCARA机器人RBT-4T03S-产品
312x299 - 10KB - JPEG
