
 手机网站
手机网站
手机网站
手机网站
开放性好的Twin CAT平台搭建机器人控制器,以SCARA机器人为研究对象,设计基于模型的算法和智能算法来提高SCARA机器人在高速搬运下的精度。本文首先对SCARA机器

scara型 机器人仿真 避障算法的研究 scara型 机
452x435 - 31KB - JPEG

SCARA机器人直线运动下的极限点求解算法
459x438 - 47KB - JPEG
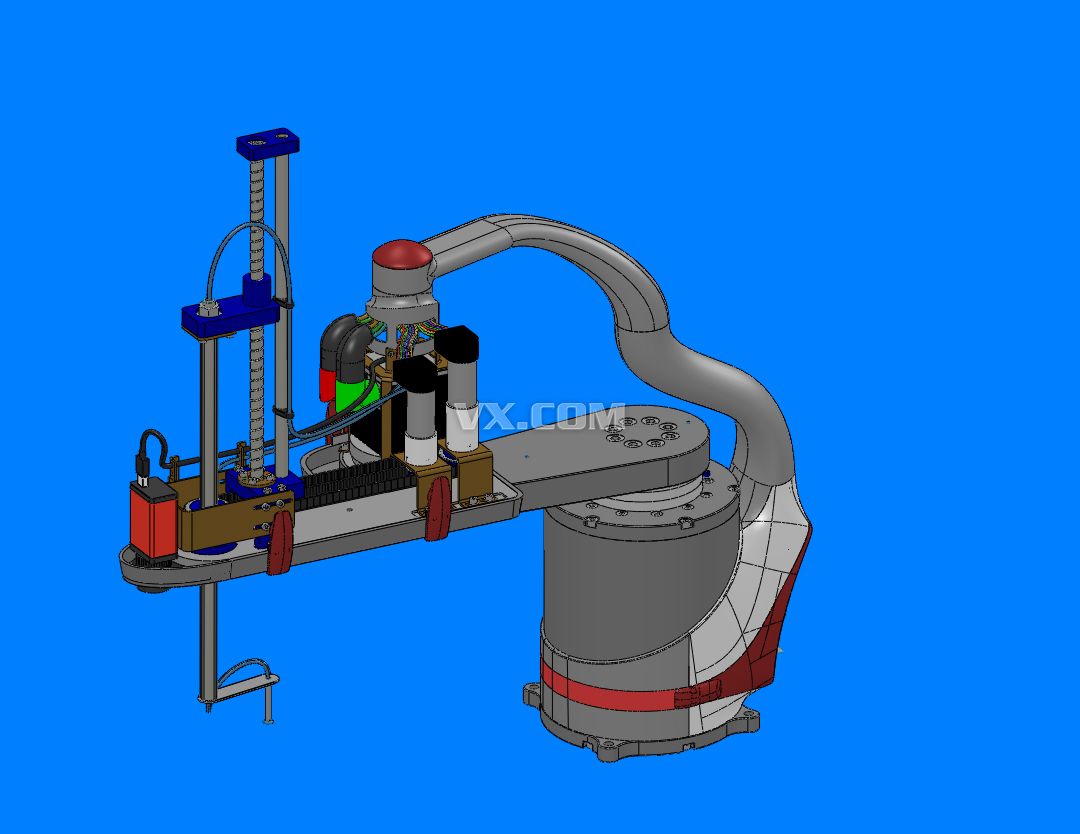
scara机器人机构图
1080x834 - 70KB - JPEG
SCARA型机器人仿真避障算法的研究
319x215 - 9KB - GIF
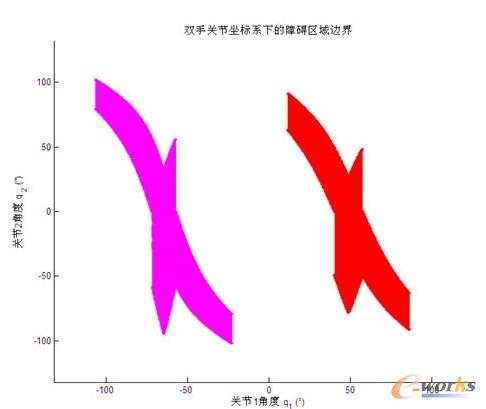
SCARA机器人二维避障的智能控制算法与仿真
486x409 - 14KB - JPEG

SCARA机器人直线运动下的极限点求解算法
456x456 - 28KB - JPEG

SCARA机器人直线运动下的极限点求解算法
465x268 - 22KB - JPEG
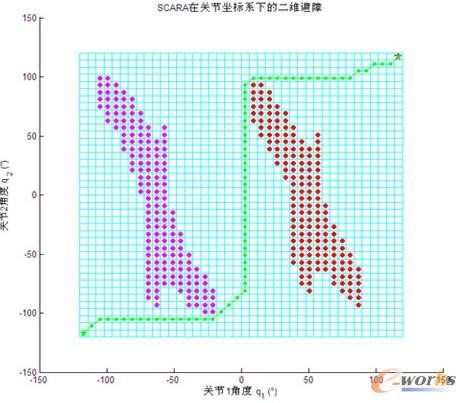
SCARA机器人二维避障的智能控制算法与仿真
466x403 - 35KB - JPEG

SCARA机器人二维避障的智能控制算法与仿真
465x459 - 18KB - JPEG
SCARA型机器人仿真避障算法的研究
310x220 - 1KB - GIF

基于TwinCAT平台的SCARA机器人运动控制算
800x1131 - 57KB - PNG

SCARA机器人直线运动下的极限点求解算法
459x438 - 31KB - JPEG

SCARA机器人直线运动下的极限点求解算法
455x401 - 24KB - JPEG

SCARA机器人直线运动下的极限点求解算法
456x456 - 20KB - JPEG

SCARA机器人直线运动下的极限点求解算法,解
596x360 - 33KB - JPEG
