
 手机网站
手机网站
手机网站
手机网站

机器人】H-845六足Stewart平台并联机构3D模型图纸Solidworks设计
476x558 - 31KB - JPEG

【机器人】三轴并联机器人结构3D建模图纸 SOLIDWORKS设计 附STEP格式
640x361 - 11KB - JPEG

并联机构图片_并联机构(4)_社会热点图片 NIBAKU.com
500x383 - 190KB - JPEG
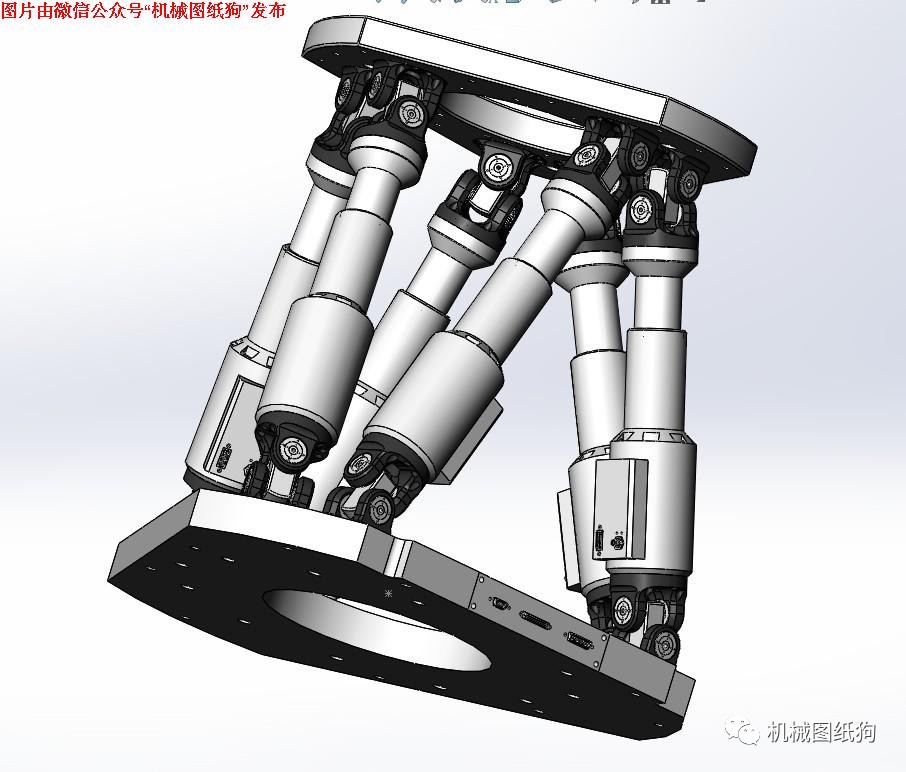
【机器人】H-845六足Stewart平台并联机构3D模型图纸 Solidworks设计_搜狐科技_搜狐网
906x772 - 98KB - JPEG
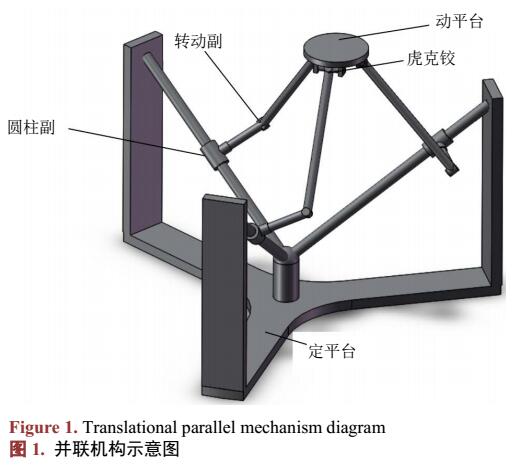
3-CRU并联机构的动力学建模
523x468 - 24KB - JPEG

髋关节试验机中3SPS+1PS并联机构有限元分析_论文_中国测控网
376x308 - 20KB - JPEG

韩国货泉机工:并联机构5轴控制MC,精彩亮相IMTS2010_国际金属加工网
500x577 - 31KB - JPEG

3支链6自由度并联机构位置分析_word文档在线阅读与下载_无忧文档
1430x1974 - 1286KB - PNG
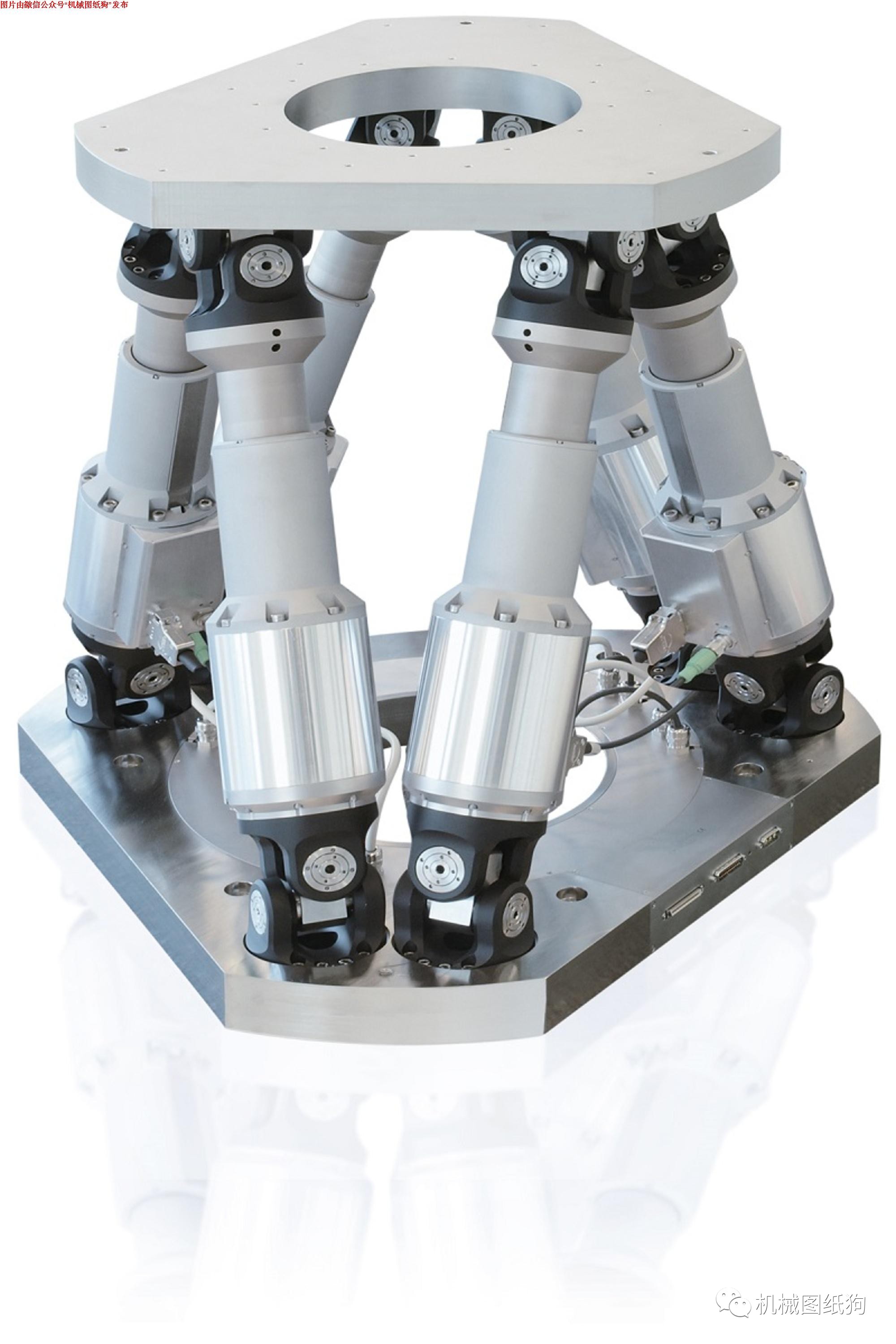
机器人】H-845六足Stewart平台并联机构3D模型图纸Solidworks设计
2000x3000 - 386KB - JPEG

4-PTT并联机构位置正反解与工作空间分析_word文档在线阅读与下载_免费文档
1280x1869 - 727KB - PNG

基于VRML的二自由度并联机构仿真_虚拟制造_先进制造技术_文库_e-works中国制造业信息化门户
349x273 - 11KB - JPEG

3-PSS并联机构正解及其在坐标测量机中的应用 - 技术论文 - 中国计量测控网
409x491 - 19KB - JPEG
并联机器人机构特点及其设计与分析-电子电路图,电子技术资料网站
383x291 - 49KB - PNG
.jpg)
新型3-RPUR并联机构的逆动力学分析
223x262 - 14KB - JPEG
.jpg)
3-PCR并联机器人机构的运动学分析
334x321 - 20KB - JPEG
