
 手机网站
手机网站
手机网站
手机网站
盖世太保自动驾驶汽车的激光雷达传感器发出红外线脉冲,测量从物体反弹的时间,传感器制作点云,制作汽车周围环境的3D快照,帮助车辆行驶。 原始点云数据的理解非常困难,并且在机器学习时代到来之前,需要训练熟练的技术人员,明确他们想手动捕获的特征。 据媒体报道,麻省理工大学的计算机科学和AI实验室( CSAIL )的研究者最近发表了一系列论文,展示了可以利用深入的学习自动处理3D图像应用的优点群。
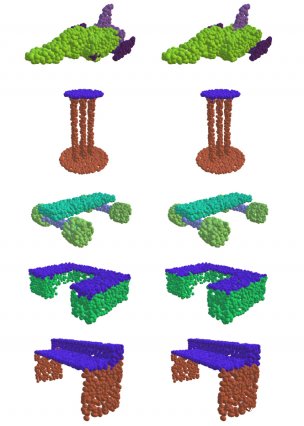
(照片来源:麻省理工学院)
论文的资深作者之一,麻省理工大学教授贾斯汀·所罗门说:“目前,90%的计算机视觉和机器学习都与2D图像有关。 我们的工作目的是更好地表现3D世界,不仅包括自动驾驶应用,还包括需要理解3D形状的领域”。
传统上,大多数方法在从空间中的三维点检索有用信息所需的数据中检索点云的模式中尤其不成功。 在该团队的论文中,研究人员显示了分析点云的方法EdgeConv,通过使用动态图表卷积神经网络,可以对各个对象进行分类和分割。 丰田研究所( Toyota Research Institute )的机器学习科学家Wadim Kehl表示:“该算法通过构筑邻点图,可以捕捉层次模型,推测各种类型的共同信息,可以用于各种下游任务。”
此外,该队还讨论了点云处理的其他方面。 例如,当许多传感器在3D世界上移动时,视场角发生改变,并且每次重新扫描同一物体时,物体的位置可能与先前不同。 要将多个点云合并到详细的世界视图中,必须对齐多个三维点。 此过程称为“对齐”( registration )。 论文作者Yue Wang博士说:“我们可以将来自各种源的3D数据整合到共同的坐标系中。 否则,我们就不能从这些方法中获得有意义的信息。 ’他说
在Solomon和Wang的第二篇论文中,呈现了被称为DCP(Deep Closest Point )的新的对准算法,为了与其他点云进行对准,能够更好地找出点云的识别的图案、点、边缘。 这在自动驾驶车确定环境中的位置(定位)上尤为重要。
DCP的一个限制是假设不仅可以看到一个表面,而且可以看到整个形状。 这意味着DCP无法对齐物体形状的部分视图(称为“部分到部分对齐”) 因此,在第3篇论文中,提出了被称为部分对准网络( PRNet )的改良算法。
根据Solomon,当前的3D数据与2D图像和照片相比,大多相当混乱,没有结构化。 Solomon的团队在不需要很多机器学习技术的受控环境下,试图从混乱的3D数据中获得有意义的信息。 DCP和PRNet表明点云处理的重要方面是方案。 对齐点云a和点云b所需的几何特征可能与对齐点云c所需的属性不同。 例如,一个点云的某些形状不能用于对齐,因为部分对齐不会显示在其他点云中。
Wang说,该团队的工具已经被许多计算机视觉领域和其他领域的研究人员使用。 其次,研究人员希望将包括从自动驾驶车收集的数据在内的这些算法应用于现实世界的数据。 Wang还表示,他们计划使用自我监控学习来探索系统的潜力,最大限度地减少所需人的注释。
本文来源于汽车房屋车牌号的作者,不代表汽车房屋观点的立场。
