
 手机网站
手机网站
手机网站
手机网站
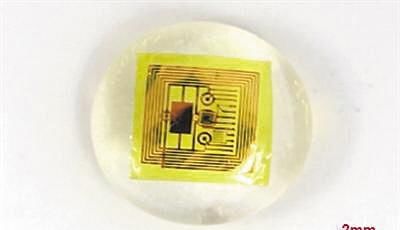
基于液滴和柔性电子技术的液体全柔性智能机器人的结构构成,天津大学提供图
《西游记》中孙悟空“72变”变身为虫子,潜入妖怪腹中活跃的故事,表现了古人对微观世界的大胆想法。 最近,天津大学精仪学院黄显教授队伍成功开发出了世界上第一个液体全柔性智能机器人,“72变化”的“血管医生”使神话成为了现实。 相关研究成果最近发表在国际工程和自然科学领域的权威期刊《尖端科学》上,得到国家自然科学基金和天津自然科学基金等的支持。
目前软件机器人存在“硬伤”现在,机器人技术已经应用于各个领域,某些机器人能够根据地理环境自由改变其结构和外观,具有运动能力、变形能力和传感能力,这类机器人被称为非晶软件机器人
“这种机器人是基于柔性电子器件具有的超薄型、柔性、可伸缩皮肤的特性,利用柔性电子技术开发的微软机器人,不仅能够反复改变形状,还能够实现运动、抓取、运输、触觉传感器等功能。” 在生物医学领域,非晶质软件机器人在控制药物释放和植入医疗机器人等方面具有很大潜力,微软机器人可以通过注射方式与血液一起进入血管,运用传感器元件和药物测量血液和血管,实现定点控制药物释放等功能。 在安全领域,非晶软件机器人可以进入不人为或危险的环境,测量环境中的物理、化学、生物等信号,环境适应能力强,在危险、探伤、搜查、军事安全领域具有广泛的应用前景。
“但在现阶段,现有或研究的软件机器人仍然有“硬伤”的周明行说明,这是因为现在柔性电子元件主要粘贴或集成在生物、机械和电子产品上,依赖物的位置固定,活动范围受到限制。 一些软件机器人能够实现运动、捕获、运输、触觉传感器等功能,但这些功能的实现主要依赖于传统刚性传感器元件和电路,不能实现机体和功能电路的完全柔性结构,严重阻碍了性能的实现,例如普通软件机器人不能进入 为了满足这个需求,需要完全柔软、没有固定形态、液体一样的机器人。
“智能液滴”成为血管医生,怎样才能做出完全柔软的机器人呢?黄显小组受自然界水母、轮虫等腔肠动物和浮游生物的启发,利用液滴柔软的非晶特性和柔性电子部件的超薄柔软特性,完全新的“智能液滴”——液状的全反射
据周明行介绍,团队基于微纳米加工技术制作极薄(厚度不足10μm,相当于头发的十分之一)的多功能柔性电子部件,利用液滴浮力和表面张力等特性,使柔性电子部件浮游在液滴表面,改变液滴的种类和部件设计,在不同的环境和控制条件下“智能液
这种“智能液滴”能够将电子器件送达目的地,完成功能性的组装。 周明行表示:“我们在水的液滴中混合了四氧化三铁纳米粒子,利用磁场控制,“智能液滴”能够以226cm/分的速度进行可编程运动。 运动中遇到小间隙或隆起的表面时,“智能液滴”可以使障碍物自由变形,到达指定位置后恢复原状”。
遇到需要多个功能的“智能液滴”时,为了不增加整体的大小,也可以按功能制作“智能液滴”。 一个是,这些“成员”到达指定的场所,利用三维磁场进行操作,从而能够组装它们。
液滴与柔性电器组合是构建全新柔性软件机器人的构想、方法,为全面实现复杂环境下独立工作的软件机器人奠定了基础。 周明行表示,该方法便于时间和劳动消费型的研究。 高通量可编程控制的特点,可应用于基因序列决策、化学合成、药物配送和微组件等需要精密操作和持续检测的领域,有望成为进行人体检测治疗的“血管医师”,具有非常重要的科学意义和应用价值。
本文来自技术日报
特别声明:本论文的转载是科普信息的必要条件,不代表本网站的观点或证明内容真实性的其他媒体、网站或个人从本网站转载使用时,应保留本网站上明确记载的“来源”,自负着作权等法律责任
