
 手机网站
手机网站
手机网站
手机网站
2014年,特斯拉将“自动驾驶”带入人们的视线,出于安全原因将其更名为“自动驾驶”。随后,科学技术的季风从美利坚合众国吹向世界各国,汽车工业也更加关注这一领域的发展。目前,“自动辅助驾驶”的核心实际上是车道辅助系统。什么是车道辅助系统,这就是我们今天要讨论的。
辅助

车道辅助系统是一个复杂的系统,它包括几个核心功能,即车道保持辅助、盲区辅助和主动安全制动。
辅助

车道保持协助,英文车道保持协助系统,简称LKA/LKAS。只有当车辆具备这一功能时,才能实现更高级别的“自动辅助驾驶”功能。车道保持系统并不是特斯拉首先开发的,他悬挂着技术的旗帜。日本人是第一个推广这一功能的人。早在2001年,日产就率先在菲尼迪将配置置于西玛和Q45之上。后来,丰田和本田也拿出了各自的LKA车道保持系统。
辅助
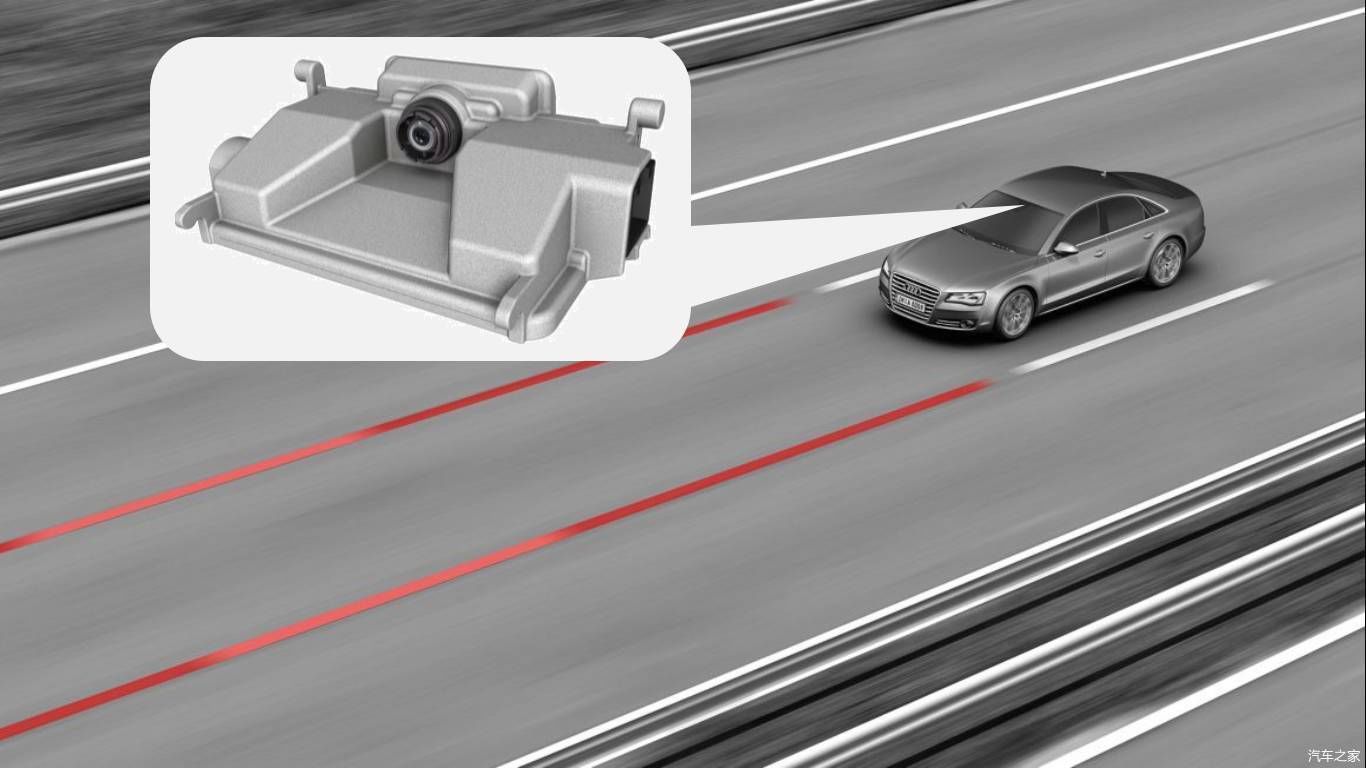
车道保持辅助系统的核心是摄像头。支持车道保持系统的车辆通常在车内后视镜前有一个高清摄像头来捕捉道路图像。
辅助

辅助
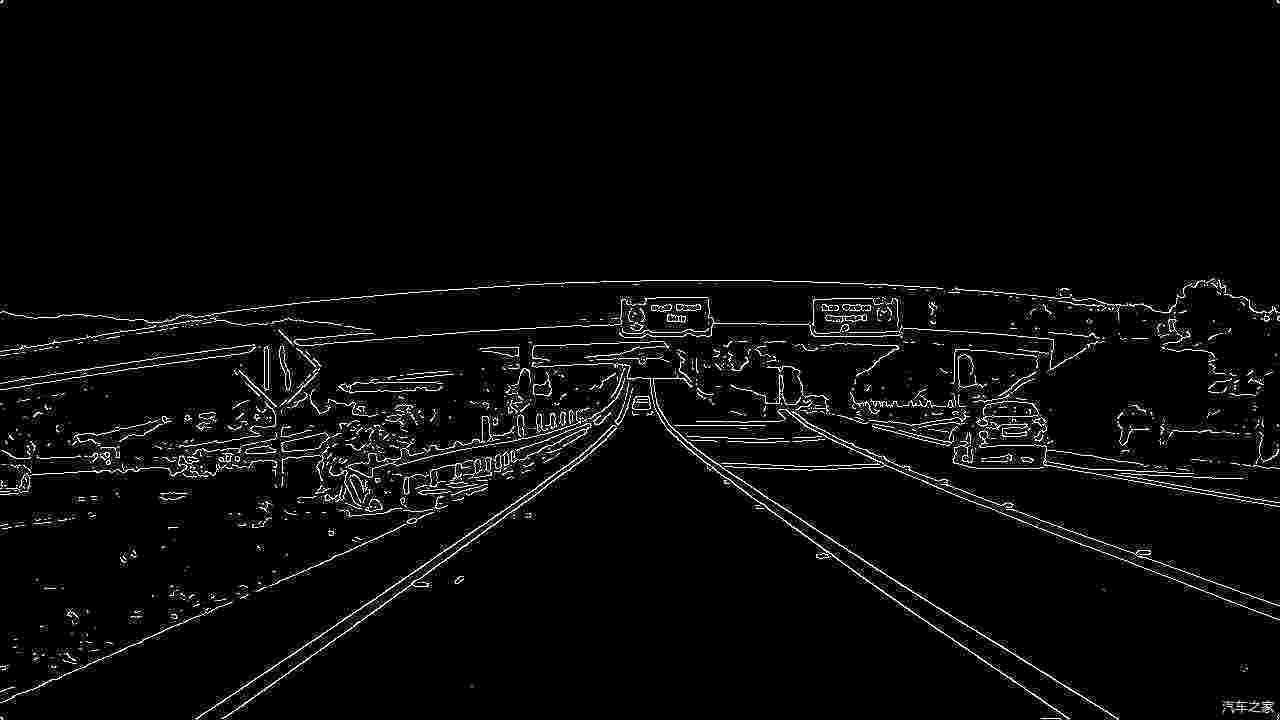
有了车道图像,交通计算机无法处理信息,因为图像太“花哨”。此时,有必要对图像进行“PS”,系统应用Canny算法来加强车道边缘,使其更加突出。
辅助
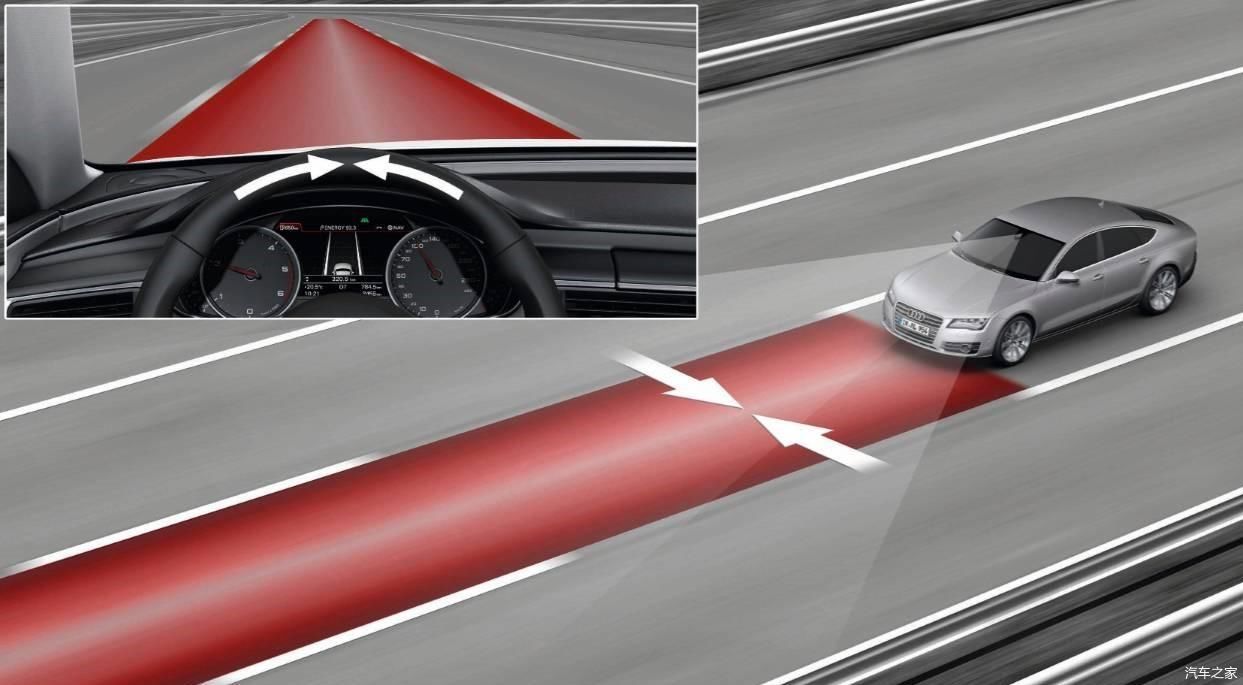
之后,系统识别车道并通过电子稳定程序控制转向系统以保持车道。虽然听起来相对简单,但实际上算法仍然相对复杂。车道保持系统不仅要处理车道图像,还要计算车道转角,甚至要了解驾驶员的意图。
辅助

因此,这对道路有很高的要求。车道线不能断裂或模糊,也不能被雪或泥覆盖。在实际使用过程中,方向盘会多次修正其行驶轨迹,这将给驾驶员一种非常强烈的“无法控制”的心理压力。为了不干扰驾驶员的正常换道,整个系统还应与转向信号灯连接。当驾驶员打开转向信号灯开关时,系统将允许车辆偏离车道。
辅助
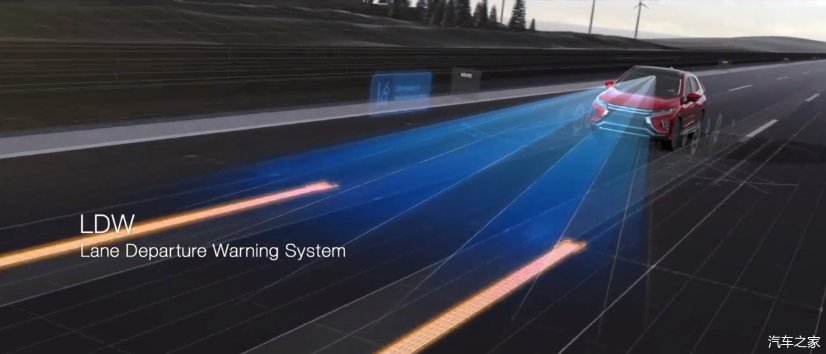
车道保持辅助系统被简化以产生车道偏离警告系统。车道偏离警告系统,英文,LDW/LDWS的简称。该系统仅使用车道保持系统的前半部分的功能,即识别车道线,而不主动干扰转向系统。不同的汽车公司会采用不同的预警方法,如声音、方向盘振动、声音+方向盘振动。
辅助
车道保持援助的延伸并没有结束,随后人们开发了紧急车道保持系统(Emergency Lane Keeping system),英文称之为应急车道保持,简称ELK。顾名思义,系统只会在紧急情况下干预方向修正。例如,WEY VV6中的紧急车道保持系统将在车辆偏离方向时自动校正方向,以防止碰撞。
辅助

为了实现紧急车道保持,除车道保持系统的硬件设施外,还需要雷达。雷达一般分为超声波雷达、毫米波雷达和激光雷达。超声波雷达成本低,测距方法简单,但在高速测距中有一定的局限性,因此通常被用作倒车雷达。毫米波雷达和激光雷达具有比超声波雷达更高的精度,但后者比毫米波雷达更昂贵,应用也不广泛。
辅助

毫米波雷达通常安装在汽车的前后,但安装位置也会影响反应速度。一般来说,它直接安装在前面,但也有例外。新款路虎极光的前毫米波雷达安装在车辆前部的右侧。英国是一个走在左边的国家。这种设计可以在双向单行道上更快地检测前方车辆。此外,由于超车道在右侧,右侧的毫米波雷达也可以更快地识别从右侧超车的车辆。
辅助

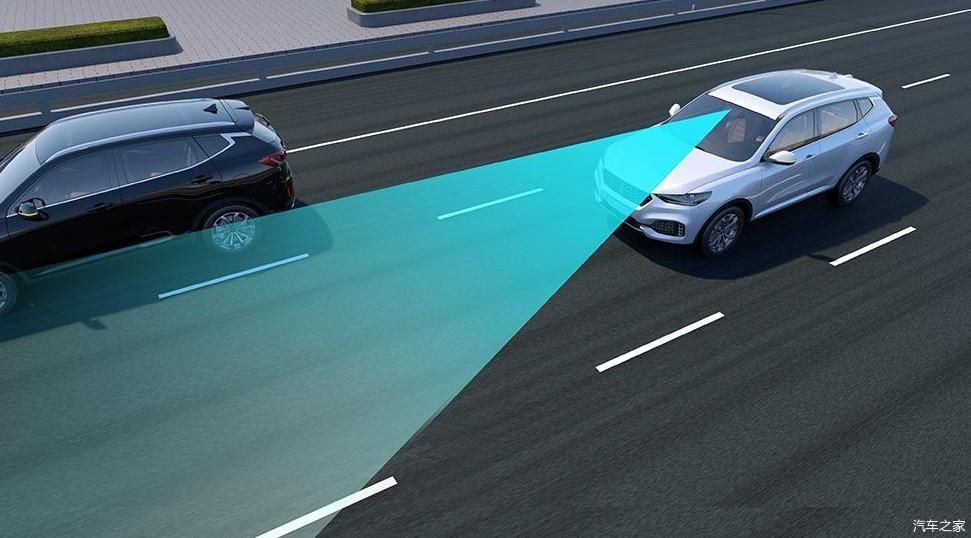
前毫米波雷达不仅可以实现紧急车道保持系统,还可以实现自动紧急制动系统。自动紧急制动系统的全称是自动紧急制动,简称AEB。自动紧急制动系统利用毫米波雷达测量车辆与障碍物之间的距离,通过行驶计算机计算车辆与障碍物之间的相对速度,然后发出报警或自动制动。自动紧急制动技术可以追溯到1992年,当时三菱首次开发了使用激光雷达的“距离报警”系统,但当时该系统不能干扰制动系统。
辅助

毫米波雷达可以实现盲区监测系统。盲区监测在英语中被称为盲点监测器,简称BSM。盲区监控使用雷达传感器监控车辆左右后方3-8m的距离,并使用算法消除固定目标(隔离屏障)和远处目标。如果雷达检测到该区域存在车辆,指示灯将点亮,以避免平行事故。
辅助
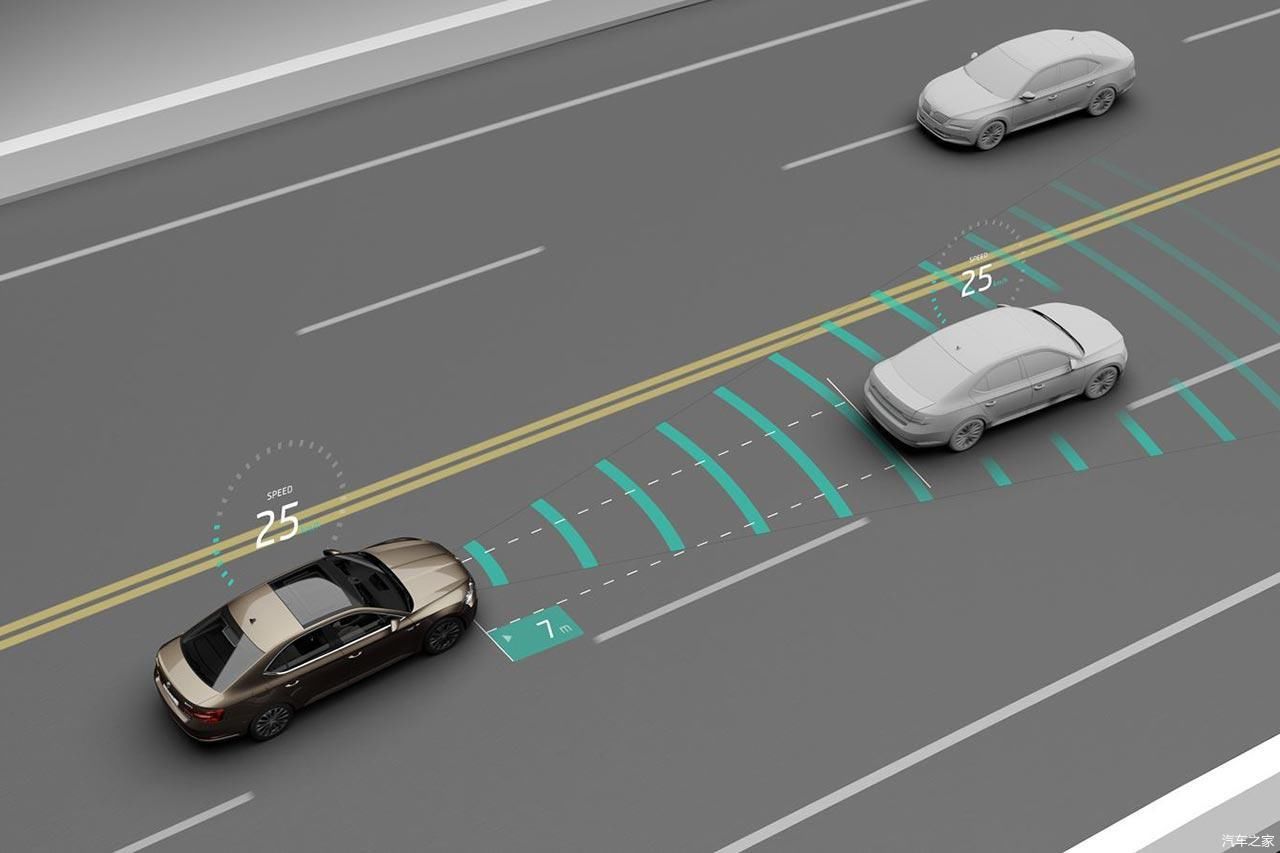
有了以上功能,你可以结合起来实现自适应巡航。自适应巡航控制,缩写为ACC。最早的自适应巡航系统也是三菱制造的。1995年三菱基于“距离警告”系统控制节流阀和换档系统来控制车速。雷达技术的下列进步使自适应巡航系统得到了更好的发展。在上述功能的祝福下,当前的自适应巡航可以控制刹车、油门和转向,这是制造商推广的L2 /L2+级自动驾驶辅助功能。
目前,世界各地的汽车公司在自动辅助驾驶技术的研发上投入了大量的人力和财力,智能出行还有很长的路要走。
本文来自车家车甲的作者,并不代表车家车的立场。
