
 手机网站
手机网站
手机网站
手机网站

自动驾驶仪域控制器
“有两个问题。一是制造燃料电池不能与日本汽车制造商分开。与他们几十年的积累相比,你想在哪些领域取得突破?其次,一个产品有时达到某个指标并不难,但在综合性能和较长的产品寿命方面需要更多的平衡。您的产品生命是什么?”
评委们发表了评论,并询问了舒静电力路演项目的翻译方某。
Shockview Power的主要研发领域是氢燃料电池金属双极板水冷反应堆,并声称是中国唯一一家关键技术指标完全可与丰田本田媲美的公司。比赛结束后,包括硕晶动力在内的八家初创企业终于进入了最近在南京市江宁区举行的新能源智能汽车与交通产业生态竞赛决赛。此次比赛由中国电动汽车100人委员会(committee of 100)牵头,目前在北京、深圳等地设有分支机构,并已将其触角延伸至北美等地。
据雷锋的新智能司机介绍,参与竞争的初创公司包括氢燃料电池、电子信息、自动驾驶算法、激光雷达、高精度定位等前瞻性技术。事实上,这些领域并不缺乏大公司的关注,但在实现全自动驾驶和成熟的三电技术之前,行业总会缺乏一些能够解决核心问题的关键技术。
才华横溢的初创企业
为了开展自主驾驶和三动力技术的研究与开发,需要有一批具有科学和工程背景的技术专家。初创公司几乎已经成为医生聚集的地方。
一家名为凌牧科技(Lingmu Technology)的自驱动域控制器公司,创始团队来自通用电气研究所的整个组织团队,拥有多年的人工智能算法和硬件系统的应用和开发背景,研发团队中有2/3拥有博士学位。担任公司总经理的瞿鑫是清华大学博士,技术和运营部门的负责人也是通用电气中央研究院的博士和前主任研究员。

Aqronos主要提供自主驾驶感知和决策解决方案,由纽约哥伦比亚大学、麻省理工学院和斯坦福大学的创始团队发起。目前,有近40名员工,其中90%以上获得了博士学位。
还有一些公司的创始人来自大学实验室。雷锋网的新智能驱动程序了解到,谭薇科技创始人兼首席执行官王世伟来自清华大学粳稻检测技术与仪器国家重点实验室,自2018年以来一直承担国家自然科学基金“卫星测绘激光雷达项目”的设计与研究。舒景力创始人方某博士在创办公司前曾在武汉712研究所和清华大学核能与新能源技术研究所工作多年。
深厚的技术背景使初创企业很容易找到行业的痛点。
众所周知,氢燃料电池是继锂电池和固态电池之后的重要电池技术,但国内在这一领域的研发和推广仍处于初级阶段。除了要改善外部加氢站的基础设施之外,氢燃料电池堆和其他部件的技术也需要解决。此外,激光雷达的成本和域控制器的计算能力也是整个行业面临的难题。以硕晶动力为例,初创公司在氢燃料电池金属双极板水冷反应器的研发方面取得了快速进展。
金属双极板水冷反应器
“我们正在开发三个系列的产品,即10kW、45kW和100kW电池。公司目前有四项核心技术,即金属双极板、自加湿技术、动力堆和控制策略。所有关键技术指标均与丰田Mirai未来组合和本田进行了全面比较。与丰田相比,我们放弃了其三维机器网络的设计,通过最小化接触系统实现了更好的管理和更好的性能。”方某说道。
针对这些棘手问题,初创企业开始进行相关的技术研发。然而,这些公司并不总是停止在技术上的工作,而是按需与汽车公司沟通。在这个过程中,一些公司还将直接从汽车公司获得订单或由于技术匮乏而进行真正的战略投资。与大公司相比,初创公司注重完善和创新,尽管它们的技术路线和业务逻辑并没有太大不同。
更喜欢在L3和自动驾驶仪上方服务
目前,许多初创企业的一个共同特点是,它们更倾向于研究和开发L3及以上的自驱动技术。
“在从L3爬升的过程中,激光雷达是自主驾驶的主要传感器,我们主要提供自主研发的全新激光雷达,以及它背后的数据计算、信号处理和决策技术。此外,我们也在开发自己的芯片,但目前我们正专注于FPGA框架。”阿克伦诺斯公司的一名员工告诉雷锋网的辛志佳,该公司已经收到了世界500强汽车公司的投资。
与其他激光雷达公司不同,Aqronos设计制造了L4以上高精度自动驾驶的高线长距离激光雷达,并发明了激光雷达单点速度测量和化学成分识别功能。它开发的产品被称为“智能光学雷达”,预计最终将耗资500美元。在整车检测系统框架内,Aqronos主要包括光子雷达、光电雷达和光学陀螺仪。探测结果主要来自分布式激光雷达系统。所有45个激光雷达激光雷达系统的成本可以降低1000美元。
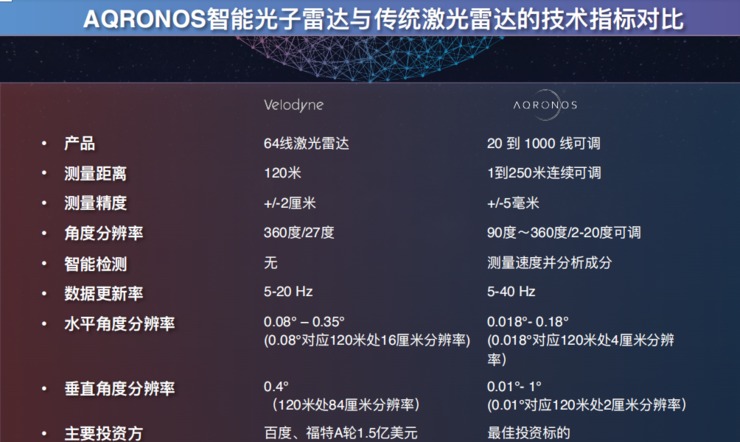
阿格拉诺斯和维罗达因产品参数的比较
另一家制造固态激光雷达传感器的公司谭薇科技成立于清华大学精密测量实验室,并提出了新一代固态扫描激光雷达技术。
根据谭薇科技的介绍,公司实现了可以大批量生产的固态扫描技术,完全不依赖芯片信号处理。它通过一个简单的模拟链接板解决了数模转换中需要解决的所有功能,成本远低于市场上的芯片价格。
理论上,激光雷达主要适用于三大领域,一是L4和更高的乘用车市场。然而,这依赖于5G通信技术、传感器技术和智能驱动系统算法,目前难以实现。第二种是特定场景中的L4商用车辆,如大型卡车和无人驾驶卡车从港口到码头,无人驾驶场所从港口到高速,以及封闭物流园区中的配送车辆。L3和L4客车的区别在于该场景路线简单,环境可控,市场需求更加迫切。最后,工业应用包括工业检测设备和工业运输设备。目前,谭薇科技正在进入最容易实现的L4商用车领域,交付给客户的产品也与此相关。

固态激光雷达传感器
类似Aqronos和谭薇科技的产品逻辑,灵木科技的核心产品是域控制器,也是一款主要为L3及以上自主驾驶提供技术支持的产品。
瞿鑫表示,在行业中通常有两种方式来实现边缘计算功能。一是改进算法。现在许多平台的计算能力在几十到几百克之间,提高计算能力后,可以实现各种大规模、快速的算法,从而实现相关功能。另一种方法是减小算法的大小和规模。目前,许多算法的规模为500兆字节到1 g,通过轻量级神经网络减小算法的大小,可以降低对计算力的要求,进而实现相同的功能。对于领先的技术来说,减小算法的大小是其核心优势。
一般来说,初创企业通过高技能人才在一些关键技术上取得了一定的成就,但它们仍然面临的共同问题是如何满足汽车法规和商业着陆的要求。在大公司推进自动驾驶和新能源汽车这三项电动技术的时候,初创企业似乎只能依靠技术进入与汽车公司的合作之路。
