
 手机网站
手机网站
手机网站
手机网站
A ROS distribution is a versioned set of ROS packages. These are akin to Linux distributions (e.g. Ubuntu). The purpose of the ROS distributions is to let developers work agains
使用具有更多新特性的最新版本Visual Studio 2010,即可非常有效地在新一代应用平台上为客户创造令人惊奇的解决方案。 Visual Studio 2010 Ultima 分享ROS 5.16 1G IMG自
目前为止只有indigo之后的版本在还在维护,indigo前面的版本建议不要使用。 ROS对应的乌班图版本: ROS Indigo Igloo 对应Ubuntu 14.04 ROS Jade Turtle 对应Ubuntu 15.04 R
3、再输入rosparam get /rosdistro就能得到版本 ubuntu@tegra-ubuntu:~$rosparam get /rosdistro 'kinetic 还能输入1000个字符 ROS最新V6.41破解全功能版版(带dude)可任意升
ROS查看版本 2017年08月16日 15:54:03 Vihaclue阅读数:4657 1、先在终端输入roscore 2、打开新终端,再输入,rosparam list 3、再输入rosparam get /rosdistro就能得到版本
Ubuntu 和 ROS版本对应关系 [复制链接] sushiqian 发表于 2018-4-1 11:26 | 只看该作者|只看大图|倒序浏览|阅读模式 duguangqian 发表于 2018-4-4 11:16 | 只看该作者 谢谢楼主
简介:需氧细胞在代谢过程中产生一系列活性氧簇( reactive oxygen species, ROS),包括:O2 -·、H2O2 及HO2·、
固件版本现在比较稳定的版本只有1.5和1.6,最底下的哪一行就是rom的描述,不过rom比较多所以描述的也不一样,有的rom是用自己rom的名字命名的,可是想的rom就不知道具体
Cartographer对ROS版本要求: ROS Indigo 对Ubantu的版本要求: 所以,综上所述: Ubantu 版本:Trusty (14.04) ROS 版本:ROS Indigo Igloo PS:ROS 网站: Cartographyer网站: 收藏
第一步: 软件源配置 1、 增加下载源(增加ubuntu版的ros数据仓库,即下载源)(通用指令适合任何版本的ros) [cpp] view plain copy sudo sh -c 'echo "deb /ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 2、 设置key,实现安全从数据仓库下载未被修改版,故设置key增加可信度 [cpp] view plain copy sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116 也有用下面这条指令的 [python] view plain copy wget /ros.key -O - | sudo apt-key add - 以上两步为安全配置下载源 可以增加本地本国的源,例如再sourcelist里增加163和sohu,这样没必要从外网下载,国内下载速度很快 3 、更新源 [python] v

ROS发展之路 版本回顾篇
320x320 - 45KB - PNG

ROS 5.21版本安装及配置,实用详细教程
896x902 - 14KB - PNG

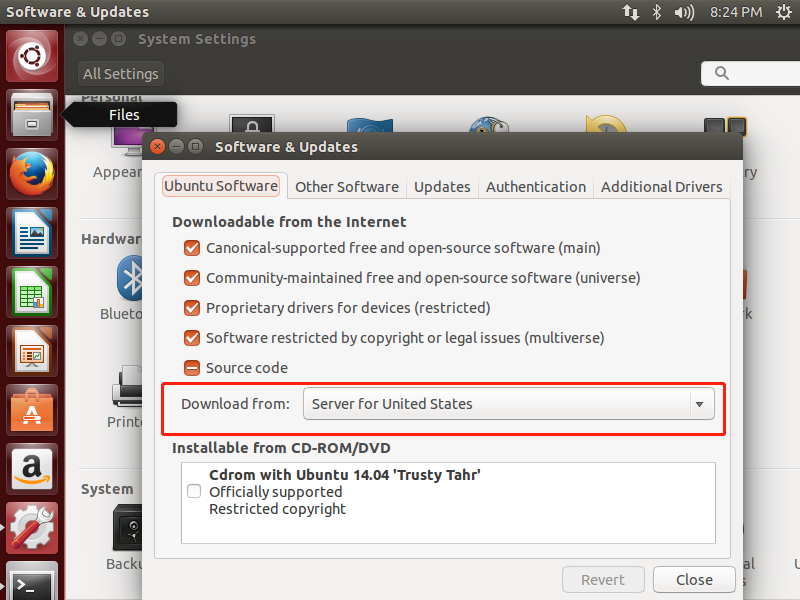
1. Ubuntu和ROS版本的对应关系
601x468 - 59KB - PNG

ROS 5.21版本安装及配置,实用详细教程
896x902 - 5KB - PNG

ROS 5.21版本安装及配置,实用详细教程
896x902 - 5KB - PNG

ROS3.20版本IPSEC设置方法
584x295 - 88KB - PNG

ROS3.20版本IPSEC设置方法
396x293 - 97KB - PNG

ros哪个版本稳定
280x220 - 9KB - JPEG

基于ROS indigo版本下kinect图像显示
1196x798 - 227KB - PNG
ROS的Indigo版本,安装MoveIt失败,试了几次都
800x600 - 129KB - JPEG

ROS 2 Crystal Clemmys版本发布,英特尔主导研
546x240 - 11KB - PNG
ROS Kinetic版本下如何一步一步实现一个基本
210x463 - 14KB - JPEG

ROS发展之路 版本回顾篇 - 蓝讯
599x438 - 40KB - JPEG

ros最新版本,ros哪个版本好,ros最新版6.7|图片
864x575 - 85KB - JPEG

ros最新版本,ros哪个版本好,ros最新版6.7|图片
500x667 - 99KB - JPEG
