
 手机网站
手机网站
手机网站
手机网站
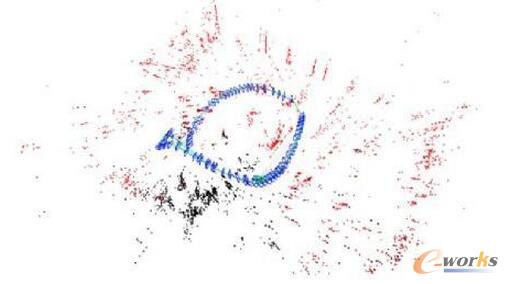
graph中连接的关键帧Kc中的ORB特征点进行三角化实现的。对Ki中每个未匹配的ORB特征,我们在其他关键帧的未匹配云点中进行查找,看是否有匹
ORB特征的三维定位与地图构建算法(SLAM)[1]。该算法由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。ORB-SLAM基于PT
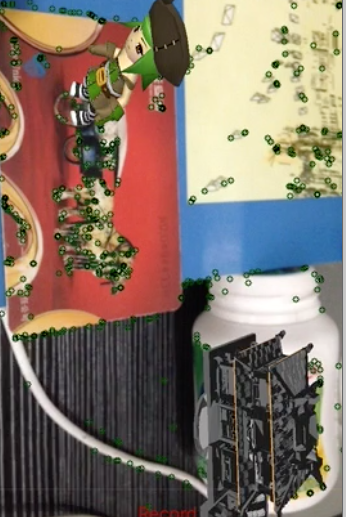
前一阵出了orbslam2,提供单目,双目和rgbd接口。加之代码也很整洁,确实是很好的工作。 特点是以orb特征贯穿始终,从一开始的特征处理,匹配,以及用于回环的bag-of-words,词典,全用的是orb。下面说说我个人对它的一些看法。 作者从opencv2.4的orb改进了一版,比opencv里的orb多了一个网格处理,尽量保证每小块图像都能提到特征,避免了局部特征点不足的情形。据我个人的测试(Thinkpad T450 i7),在640x480的图像中提取500orb约用时13ms左右,匹配精度可以接受,满足实时性要求。 相比于lsd-slam,orb-slam更像一个系统工程--采用当前各种主流的方式计算slam。它稳重大方,不像lsd那样追求标新立异。orb-slam基于研究了很久的特征点,使用dbow2库进行回环检测,具备重新定位能力,使用g2o作为global和local的优化,乃至pnp也用g2o来算。从效果而言比lsd优化,代码也比lsd整洁,更适合继续开发。虽说如楼上所言不像ptam那么惊艳(比如slam++名字好听效果好看但是不开源啊),我们做研究毕竟还是效果
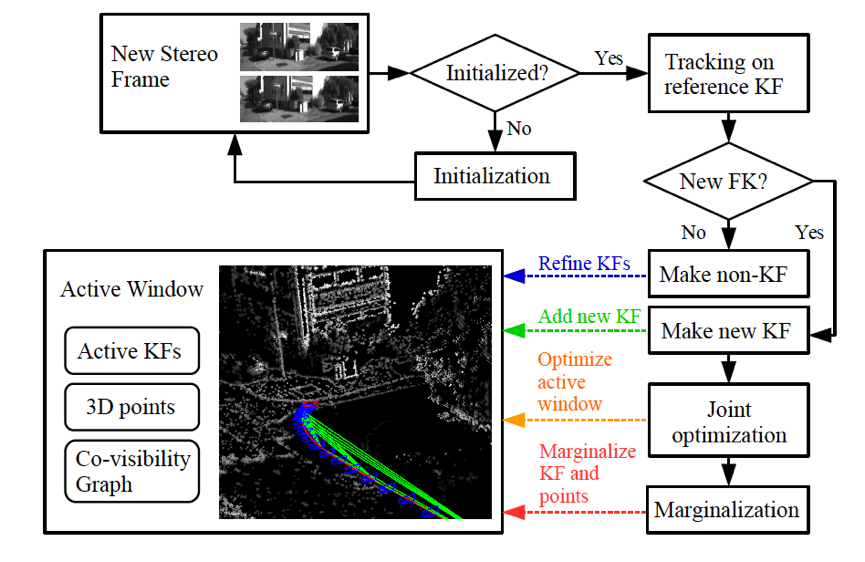
orb-slam论文的翻译,该系统主要涉及到三个并行处理的线程:跟踪线程,局部地图优化线程,闭环控制线程。所有的优化部分都是基于g20实现。相关下载链接://download.csdn.ne
最近在读ORB-SLAM的代码,虽然代码注释算比较多了,但各种类和变量互相引用,看起来 作者的程序分为两种模式:SLAM模式和Localization模式。SLAM模式中,三个线程全部都
svo对于手持拍摄视频不好,作者提供的无人机测试数据还可以。 orb-slam和lsd今年都有新论文可以看看,多个方法各有优劣。 对于移动平台,目前单目slam算法的运算和存储要
泡泡机器人公开课程:orb-slam的简单讲解-冯兵_bilibili 泡泡机器人发消息 泡泡机器人是中国SLAM研究爱好者自发组成的团体,在自愿条件下分享S
SLAM
865x562 - 248KB - PNG
移动机器人的几种视觉算法_移动应用_基础信
508x284 - 16KB - JPEG

|期刊分享|SLAM|ORB-SLAM2 SLAM开源库 上
640x431 - 146KB - PNG

|期刊分享|SLAM|ORB-SLAM2 SLAM开源库 上
324x513 - 198KB - PNG
基于ORB-SLAM的移动机器人嵌入式实现与优
236x355 - 11KB - JPEG

ORB SLAM在Ubuntu14.04下环境配置
1277x727 - 227KB - PNG
【ORB-SLAM代码理解及笔记】- 一点资讯(Yid
385x356 - 27KB - JPEG

ORB-SLAM a Versatile and Accurate Monocula
907x1222 - 442KB - PNG

ORB_SLAM - 3:和markerless AR的结合
260x368 - 146KB - PNG

ORB-SLAM代码理解及笔记
474x445 - 27KB - JPEG

ORB-SLAM代码理解及笔记
410x314 - 8KB - JPEG
【ORB-SLAM代码理解及笔记】- 一点资讯(Yid
481x437 - 93KB - JPEG
ORB-SLAM代码理解及笔记
734x319 - 16KB - JPEG
ORB_SLAM - 5:SLAM多目标添加
346x517 - 307KB - PNG
ORB-SLAM代码理解及笔记
419x462 - 27KB - JPEG
