
 手机网站
手机网站
手机网站
手机网站
打开ORB-SLAM2中的ros_mono.cc源文件(如下图),将subscribe的话题改为/usb_cam/im 应该返回如下结果:/opt/ros/kinetic/share:/home/xxx/ORB_SLAM2/Examples/ROS/ORB_
这里分享一下我搭建ORB SLAM2环境的过程。实验环境:Ubuntu 16.04 + Ros Kinetic + ORB_SLAM安装源文件目录安装orb_slam首先需要安装依赖库安装Pangolin sudo apt-
ORB_SLAM2后,参照其说明进行了数据集的简单测试,然后尝试使用ROS进行实时SLA 准备工作及软件版本说明注意:如果要使用USB摄像头运行ORB-SLAM2,不能使用虚拟机
准备工作及软件版本说明注意:如果要使用USB摄像头运行ORB-SLAM2,不能使用虚拟机,否则会出现摄像头打开一片绿屏或者黑屏的现象。操作系统 :Ubuntu 16.04 ROS版本 :k
第三步:安装orb_slam依赖项 再按照第一步中链接里的第五点安装orb_slam的依赖项 第 如果你的系统是Ubuntu14.04的话,按照来装,基本没问题,要是Ubuntu16.04的话,hhhhhh,如
ORB-SLAM2是不完全依赖ROS的,它有两个编译选项,对应两个脚本文件build.sh和build ROS Kinetic ONLY supports Wily (Ubuntu 15.10), Xen
要编译ORB_SLAM2的ROS例程首先需要安装ROS,以及在ROS下安装usb_cam驱动并调用,最后搭建ORB_SLAM2。 1.ROS的安装 我的电脑安装的是ubuntu16.04系统,所以我安
博主的编程环境是Ubuntu14.04+Ros Indigo,为了方便记录,采用的是虚拟机环境,可能有点 rosrun lsd_slam_core live_slam image:=/image_raw camera_info:=/camera_info rosba
ORB-SLAM2运行数据集时Pangolin界面卡住,不能生成轨迹以及用摄像头运行非ROS版 ORB_SLAM2遇到的坑 编译ORB-SLAM2提示:undefined reference to symbol '_ZN2cv6
考虑到ORB_SLAM2中也选择pangolin作为显示工具.(之前在跑ORB-SLAM2时已经安装 因为看网上别人都是在ubuntu16.04下来跑的,而16.04下自带的opencv3.x的版本,而14.0
OS X 平台上有哪些值得推荐的常用软件? - 黄耀
1280x719 - 51KB - JPEG

杭州的ros智能机器人培训课程都教哪些东西
600x400 - 376KB - PNG

Other Sensors and ROS gmapping (SLAM)
242x232 - 5KB - PNG

ROS机器人Diego1#制作(十二)SLAM导航的配
412x601 - 75KB - PNG
本科小白学ROS 和 SLAM(一):杂谈-中国学网-中
2400x3200 - 1909KB - JPEG

算法工程师SLAM(ROS等SDK.招聘-北醒招聘-
396x397 - 13KB - JPEG

ROS机器人Diego1#制作(十二)SLAM导航的配
2449x3449 - 1051KB - PNG

ROS 用hector_slam建图
678x260 - 10KB - JPEG

机器人算法工程师(ROS\/SLAM)
474x474 - 15KB - JPEG

机器人自主定位导航 ROS真的好用吗?_中国德
897x852 - 208KB - PNG
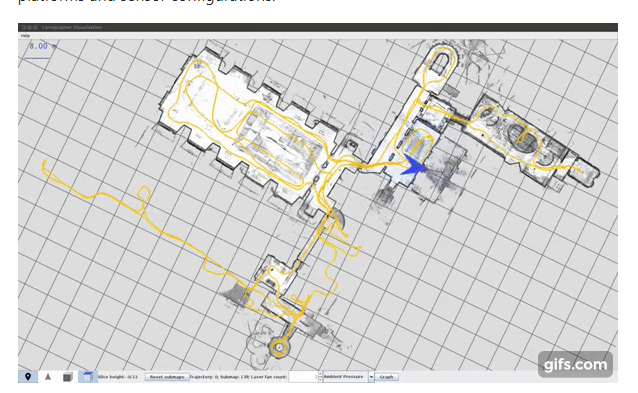
ROS 系统支持的 SLAM 库
638x393 - 319KB - PNG

ROS 用hector_slam建图
678x260 - 20KB - JPEG
ROS 用hector_slam建图
500x260 - 17KB - JPEG
ros,slam
400x400 - 10KB - JPEG

对比几种在ROS中常用的几种SLAM算法
638x356 - 50KB - PNG
