
 手机网站
手机网站
手机网站
手机网站
路径规划几种算法的比较与分析 会员到期时间: 剩余下载个数: 剩余C币: 剩余积分:0 为了良好体验,不建议使用迅雷下载 VIP下载 您今日下载次数已达上限(为了良好下载体验及
转 浅谈路径规划算法 Andrew_GuSD 阅读数:56331 2017-09-19 原文地址: 1 导言 移动一个简单的物体(object)看起来是容易的。而路径搜索是复杂的。为什么涉及到路径搜索
RRT算法是RRT算法的变种算法,算法可以收敛到最优解,不仅可以实现二维环境下的路径规划,多维度的环境也可以使用RRT算法,而且由于算法是均匀采样,并不会出现局部最小
路径规划算法及其应用综述 zuofangcheng19|2014-05-26 |举报 专业文档 专业文档是百度文库认证用户/机构上传的专业性文档,文库VIP用户或购买专业文档下载特权礼包的其他
2、将路径规划功能写在定位之后,获取到定位数据之后再进行路径规划,这样的优点是定位点相对准确,缺点是应用相应速度慢,耗时比较长,群里的大神同样遇到这个问题; 3、两
路径规划算法 天瀑cqj上传于2011-05-16|暂无评价|0|0|简介|举报 路径规划 阅读已结束,下载文档到电脑 1下载券 下载 想免费下载本文?立即加入VIP 免下载券下载文档 10万篇精
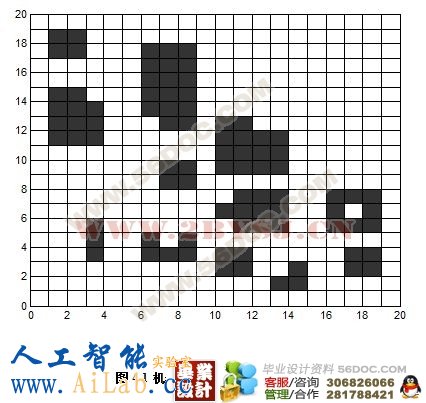
简介:路径规划是指,在具有障碍物的环境中,按照一定的评价标准,寻找一条从起始状态到目标状态的无碰撞路径。
将导致规划算法计算量较大。基于随机采样技术的PRM法可以有效解决高维空间和复杂约束中的路径规划问题。 PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,
缺点:A*算法通过比较当前路径栅格的8个邻居的启发式函数值F来逐步确定下一个路径栅格,当存在多个最小值时A*算法不能保证搜索的路径最优。 A*算法;A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法。估价值与实际值越接近,估价函数取得就越好。A*[1] (A-Star)算法是一种静态路网中求解最短路最有效的直接搜索方法。注意是最有效的直接搜索算法。之后涌现了很多预处理算法(ALT,CH,HL等等),在线查询效率是A*算法的数千甚至上万倍。公式表示为: f(n)=g(n)+h(n),其中 f(n) 是从初始点经由节点n到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n) 是从n到目标节点最佳路径的估计代价。保证找到最短路径(最优解的)条件,关键在于估价函数f(n)的选取:估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。但能得到最优解。并且如果h(n)=d(n),即距离估计h(n)等于最短距离,那么搜索将严格沿着最短路径进行, 此时的搜索效率是最高的。如果 估价值>实际值,搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
ROS Navigation包里面的GlobalPlanner自带是提供了两种全局路径规划的方法,dijkstra 特别的,当f(n) = g(n)的时候为Dijkstra算法 这里附上ROS的介绍效果图 这里还有一个值

自动驾驶想要更安全 路径规划算法很重要
549x372 - 35KB - JPEG

自动驾驶想要更安全 路径规划算法很重要
431x224 - 10KB - JPEG
机器人路径规划算法优缺点比较
500x340 - 13KB - JPEG

基于未知环境下改进的RRT路径规划算法 - 传动
550x377 - 44KB - JPEG
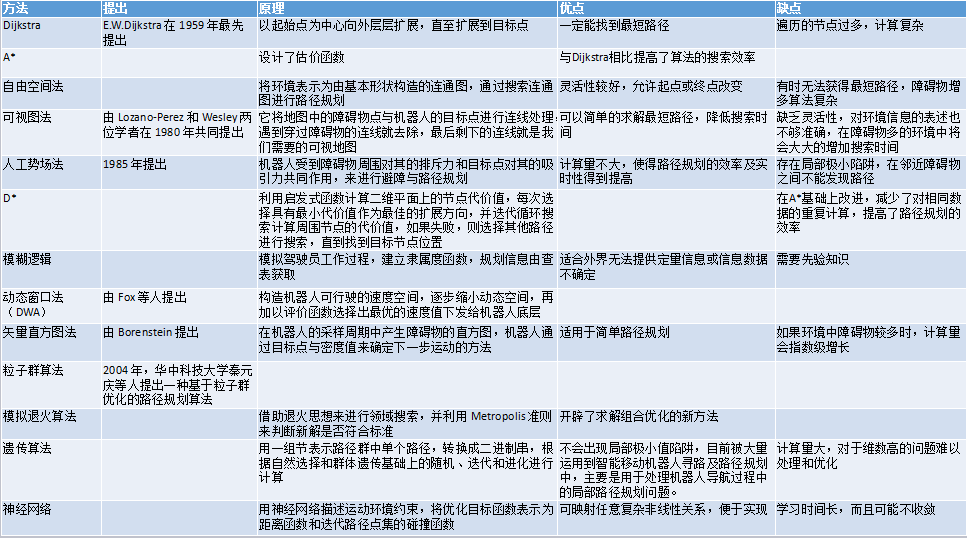
机器人路径规划算法优缺点比较
967x538 - 220KB - JPEG

几何方法的人员疏散多威胁规避路径规划算法
800x1168 - 383KB - PNG
图论动态规划算法--Floyd最短路径
394x422 - 23KB - JPEG

基于遗传算法的机器人路径规划MATLAB源码.
993x1404 - 66KB - PNG

Dijkstra算法在移动机器人路径规划和避障中的
800x1102 - 441KB - PNG
基于蚁群算法的机器人路径规划(附仿真程序)☆
426x403 - 48KB - JPEG

机器人路径规划算法的研究.pdf
800x1132 - 295KB - PNG

移动机器人全覆盖路径规划算法综述_word文档
1449x2004 - 738KB - PNG

清洁机器人全覆盖路径规划算法综述._word文档
1447x2030 - 945KB - PNG

基于栅格法的机器人路径规划蚁群算法
773x1545 - 21KB - PNG

基于人工鱼群算法的机器人路径规划_word文档
735x621 - 336KB - PNG
