
 手机网站
手机网站
手机网站
手机网站
局 部 路 径 规 划 算 法 研 究 jlu520503上传于2010-11-14 智 能 系 统 局 部 路 径 规 划 算 法 研 究 技 术 创 新 《 微计算机信息 》 ( 测控自动化 )2009 年第 25 卷第 9- 1 期 360
teb局部路径规划算法github地址:。 作者列出的几篇文章均推荐阅读了解。本文基于《Trajectory modification considering dynamic constraints of autonomous robots》一文。 关
[1]诸葛程晨,许劲松,唐振民.基于支持向量机的局部路径规划算法[J].哈尔滨工程大学学报,2019,40(02):323-330.[doi:10.11990/jheu.201708085] ZHUGE Chengchen,XU Jinsong,
它包括全局路径规划和局部路径规划。水下机器人局部路径规划,是在对环,本文针对二维已知静态环境,提出了一种局部势场路径规划算法,该算法利用垂直作用在穿越障碍的虚
机器人局部路径规划算法的研究与实现 文档格式: .pdf 文档页数: 2页 文档大小: 44.18K 文档热度: 文档分类: 通信/电子 -- 数据通信与网络 使用手机扫码阅读、下载文档、立享9
然后调用局部路径规划器根据这条路线及costmap的信息规划出机器人在局部时做出具体行动策略,ROS中主要是使用了DWA算法。在ROS中每当move_base处于规划状态就调
他的功能是给一个global plan和local costmap,局部路径规划器计算出可行的速度发送给 算法主要是在局部的costmap中模拟计算沿着不同的方向进行定义的cost函数的大小,选
机器人ROBOT DOI:10.13973/j.cnki.robot.2014.0491基于多层 Morphin搜索树的 UGV局部路径规划算法 (南京理工大学模式识别与人工智能研究所,江苏南京 210094) Vol.36, No
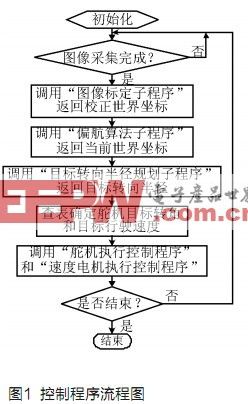
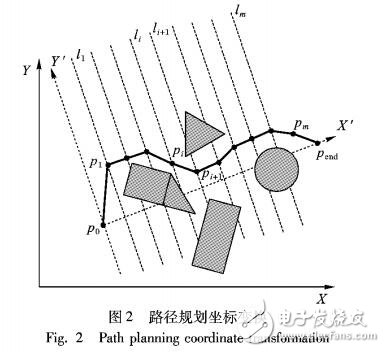
建立了简单可行且满足实时性要求的局部路径规划算法,进而确定了智能车高速稳定行驶的转向角和车速。局部路径规划算法流程控制程序流程如图1所示。首先,采集图像信号
ROS的路径规划器分为全局路径和局部路径规划,其中局部路径规划器使用的最广的为d 首先计算各个方向的最大速度和最小速度,DWA算法只在第一步进行采样,所以最大速度

自动驾驶想要更安全 路径规划算法很重要
549x372 - 35KB - JPEG
智能车高速稳定行驶局部路径规划算法
264x252 - 13KB - JPEG

智能车高速稳定行驶局部路径规划算法
530x263 - 34KB - JPEG
移动机器人路径规划算法研究及仿真平台的设计
500x387 - 20KB - JPEG

基于未知环境下改进的RRT路径规划算法
300x214 - 18KB - JPEG
智能车高速稳定行驶局部路径规划算法
248x404 - 25KB - JPEG
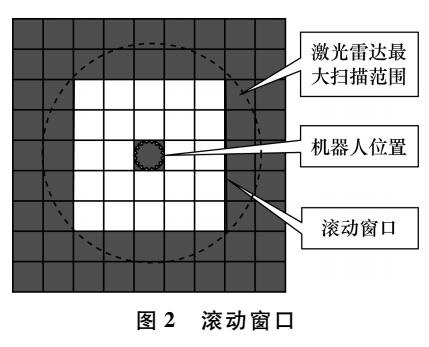
基于滚动窗口的路径规划算法
429x347 - 22KB - JPEG

智能机器人路径规划及算法研究.pdf
800x1132 - 446KB - PNG

一种基于图像声纳的AUV局部路径规划方法_w
491x214 - 54KB - PNG
斥力场下粒子群优化的移动机器人路径规划-电
385x352 - 27KB - JPEG

密集障碍物环境下移动机器人全局路径规划-应
374x337 - 49KB - JPEG

改进微粒群算法在机器人路径规划中的应用
959x1329 - 531KB - PNG

一种基于图像声纳的AUV局部路径规划方法_w
967x539 - 25KB - PNG

自动驾驶想要更安全 路径规划算法很重要
550x315 - 14KB - JPEG
智能车高速稳定行驶局部路径规划算法
251x259 - 12KB - JPEG
