
 手机网站
手机网站
手机网站
手机网站
基于可视图法的水面无人艇路径规划设计卷第期(总第期)中国造船VolNo(SerialNo)年月SHIP 简介:本文档为《基于可视图法的水面无人艇路径规划设计(可编辑)doc》,可适用于初
学校代码:分类号:德2密级:公开UDC:623.8学号:142667硕士学位论文基于导航误差约束的水面无人艇路径规划方法研究研宂生姓名:刘钰导师姓名:程向红申请学位类别工学硕士
欢迎的朋友 首页 水面无人艇路径规划研究综述 水面无人艇路径规划研究综述 摘要: 水面无人艇近年来受到国内外专家学者越来越多的关注.为了总结分析USV现有路径规划方
Waypoint navigation 2.2.1传统路径规划算法分析…·1 0 2.2.2处理路径规划问题的新兴算法…·12 2.3水面无人艇路径规划特点分析…17 2-3.1无人艇运动特性研究… 1 7 2.3.2
分类日:--《毁:--编号:--工学硕士学位论文水面无人艇路径规划技术研究硕士研究生指导教师学科、专业学位论文主审人张玉奎邹劲研究员船舶与海洋结构物设计制造黄德波教授
水面无人艇路径规划研究综述 专业文档 专业文档是百度文库认证用户/机构上传的专业性文档,文库VIP用户或购买专业文档下载特权礼包的其他会员用户可用专业文档下载特权
编号:——工学硕士学位论文水面无人艇路径规划技术研究硕士研究生指导教师学科、专业学位论文主审人邹劲研究员船舶与海洋结构物设计制造黄德波教授哈尔滨工程大学 2
水面无人艇(Unmanned Surface Vehicles, USVs)是一种新型的水面智能载具,其中全局路径规划是USV研究的关键技术,它可以反映出USV的智能程度。为了解决USV的全局路径
(申请工学博士学位论文)水面无人艇路径规划及自主避障方法研究培养单位:交通学院学科专业:船舶与海洋结构物设计制造指导老师:茅云生教授副指导老师:向祖权副教授 2015
车辆路径规划寻路算法有很多,apollo路径规划模块使用的是启发式搜索算法A*寻路算法 a*算法是一种在路网上中求解最短路径的直接搜索寻路算法,原理是引入估价函数,加快搜

我国研制全球首款双M型高速智能无人艇成功
690x454 - 49KB - JPEG

路径规划
500x625 - 67KB - JPEG
全球首条双M型高速智能无人艇在汉试航
640x640 - 30KB - JPEG

无人水面溢油监测回收系统
803x603 - 513KB - PNG
国内首次!无人机通过视觉在无人艇上自主起降
640x360 - 38KB - JPEG

扫地机器人是怎么做路径规划的?_智能硬件_亿
580x211 - 79KB - JPEG

无人艇团队技术难点在东莞成功突破!全国首例
600x400 - 250KB - JPEG

中国造全球首款无人艇,隐身时速100公里,三位
485x292 - 53KB - JPEG

中国不仅无人机强,现全球独创无人艇,被指为颠
597x364 - 33KB - JPEG

基于可视图法的水面无人艇路径规划设计.pdf-工
800x1131 - 285KB - PNG

世界第一款实战意义无人艇,中国技术成为世界
572x405 - 352KB - PNG

水面无人艇路径规划算法研究.pdf
800x1147 - 99KB - PNG

图文:全球首条双M型无人艇 武汉造
530x308 - 21KB - JPEG

一种内河海事无人艇路径规划算法设计与仿真_
1410x2024 - 1390KB - PNG
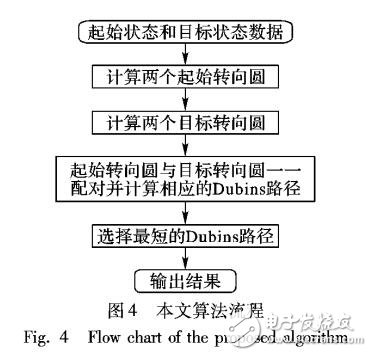
基于Dubins路径的无人艇运动规划算法 - 电子电
372x356 - 28KB - JPEG
