
 手机网站
手机网站
手机网站
手机网站
指出了局部路径规划各种方法的优点与不足 ; 对局部路径规划技术今后的发展方 向做出了展 望 。 关键词 : 机器人 ; 路径规划 ; 全局 ; 局部 ; 传感器 中图分类号 :T P 242 文献标识
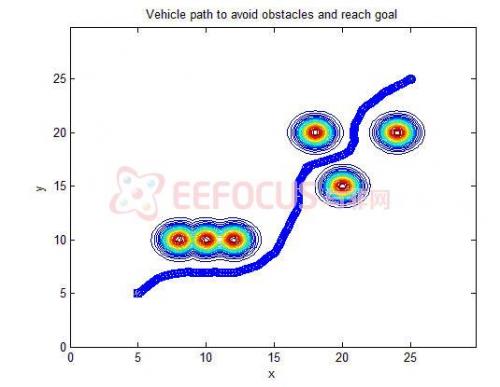
局部路径规划的人工势场法源代码经调试后发现可以避障且能到达目标点-Local path planning of artificial potential field source can be found by debugging and can reach the targ
ROS关于movebase的局部路径规划代码解析 2018年10月26日 15:51:47 碧影江白阅读数:506 终于做完了机器人movebase路径规划算法的修改工作,现在把工作时写的笔记分
在move_base节点中,通过类加载模块载入了BaseLocalPlanner(局部路径规划)的子类DWAPlannerROS的实例tc_,并调用其初始化函数,获取了一些初始状态信息比如机器人当前
然后全局规划器控制执行系统按照该路径运动。在运动过程中,感知系统会持续对周围环境进行感知。当发现动态的物体或未知障碍时,局部规划器根据这些感知到的局部信息,确
其中max_vel,min_vel为人为设定的最大和最小速度,vel是当前速度,acc_lim是人为设定的最大加速度,sim_period是第一步的模拟时间,由人为设定的局部路径规划频率决定,默认为
然后,利用SimpleScoredSamplingPlanner:findBestTrajectory(Trajectory& traj, std:vector Trajectory * all_explored = 0)查找最优的局部路径。在该函数中,先调用每个打分项的prep
MATLAB中文论坛MATLAB测试&测量板块发表的帖子:帮忙分析一下人工势场法的局部路径规划程序。请各位大侠帮忙分析一下 MATLAB人工势场法的局部路径规划程序,为什
ROS局部路径导航包括Trajectory Rollout 和 Dynamic Window Approach (DWA)两种方法,理论上来说分别对应base_local_planner和dwa_local_planner两个包,但其实dwa的大部
移动机器人路径规划算法研究及仿真平台的设计
500x387 - 20KB - JPEG

一种基于图像声纳的AUV局部路径规划方法_中
911x1200 - 132KB - PNG

自动驾驶想要更安全 路径规划算法很重要
549x372 - 35KB - JPEG

Q_学习及其在智能机器人局部路径规划中的应
845x2000 - 460KB - PNG

一种基于图像声纳的AUV局部路径规划方法_w
491x214 - 54KB - PNG

基于虚拟势场理论的AUV局部路径规划方法_w
1390x1976 - 648KB - PNG

无人驾驶车辆局部路径规划的时间一致性与鲁棒
959x1361 - 505KB - PNG

局部未知环境下移动机器人路径规划研究-机械
800x1131 - 5KB - PNG

基于动态虚拟障碍物的智能车辆局部路径规划方
957x1468 - 687KB - PNG
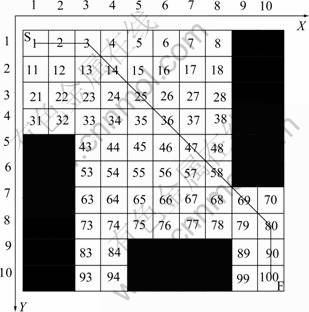
基于栅格法的矿难搜索机器人全局路径规划与局
309x312 - 20KB - JPEG

视觉导航中局部路径规划方法研究及嵌入式实现
800x1262 - 95KB - PNG
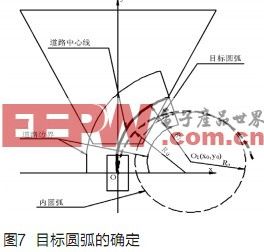
智能车高速稳定行驶局部路径规划算法
264x252 - 13KB - JPEG

移动机器人路径规划研究-测试计量技术及仪器
800x1132 - 223KB - PNG

物品自动运送机器人原型系统的局部路径规划研
1664x2360 - 62KB - PNG

教育移动机器人路径规划技术研究.doc
993x1404 - 104KB - PNG
