
 手机网站
手机网站
手机网站
手机网站
所示,码垛机器人具有独特的线性执行机构,使其保证了手部在水 平与垂直方向的平行移 四自由度码垛机器人的运动控制系统主要包括感知部分、硬件部分和软件 部分,其运动
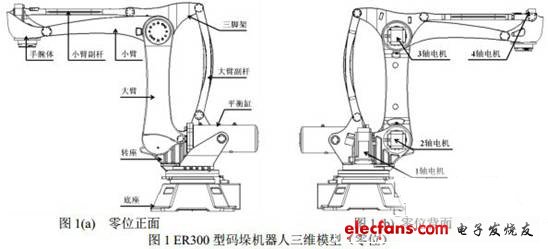
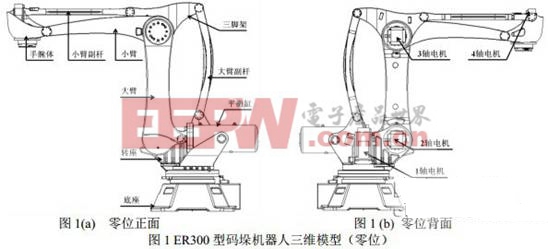
四自由度码垛机器人本体由腰部、大臂、小臂、腕部组成。图1码垛机器人简图腰部大臂小臂腕部 2如图 2所示,码垛机器人具有独特的线性执行机构,使其保证了手部在水平与垂
该机具有四个自由度,分别为:腰部回转、大臂摆动、小臂俯仰、腕部回转。图 1码垛机器人机构虚拟简图1. 2正运动学分析机器人正运动学问题是指已知连杆几何参数和关节运动
doc格式-75页-文件0.99M-毕业设计(论文)-四自由度码垛机器人控制系统设计Shandong University Bachelors Thesis论文题目,四自由度码垛机器人控制系统设计姓名学号
介绍了移动关节与回转关节组合式串并联的混联机器人机构特点,分析了该机器人的运动 其机构运动简图如图2所示。腕部平图1四自由度混联码垛机器人图2机构运动简图及D—
简介:简介中科院合肥物质科学研究院先进制造技术研究所研制的四自由度工业搬运机器人项目突破了工业机器人高速
码垛机器人结构特点及运动空间,展现了一般码垛机器人与六自由度机器人的结构差异和 本文通过对ER300码垛机器人机构的分析,展现了一般码垛机
专业文档是百度文库认证用户/机构上传的专业性文档,文库VIP用户或购买专业文档下载 具体共享方式由上传人自由设定。了解文档类型 专业文档 专业文档是百度文库认证用
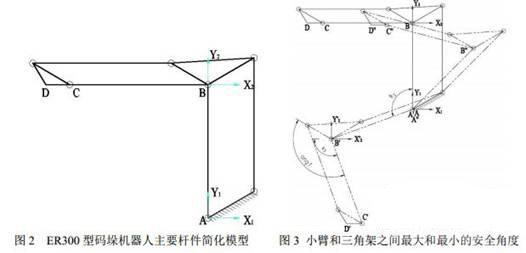
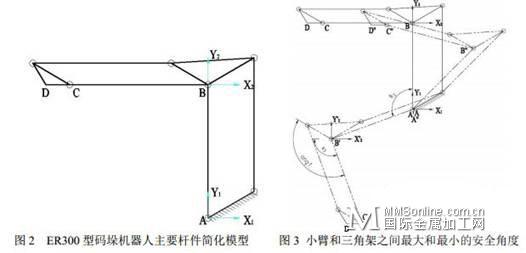
(山东科技大学机械电子工程学院,山东青岛 266590)摘要针对四自由度码垛机器人采用 得到结果如下n-1 Tn =An码垛机器人机构简图人的机构特点,如图2所示,由于 ABDE ,所以
四自由度码垛机器人机构和运动分析 - 伺服与控
548x249 - 25KB - JPEG
一种四自由度码垛机器人机构和运动分析 - 21i
526x253 - 27KB - JPEG

四自由度码垛机器人机构和运动分析
500x227 - 47KB - JPEG

一种四自由度码垛机器人机构和运动分析 技术
526x253 - 13KB - JPEG
一种四自由度码垛机器人机构和运动分析-国际
526x253 - 13KB - JPEG

一种四自由度码垛机器人机构和运动分析 - 传动
594x270 - 33KB - JPEG

四自由度码垛机器人机构和运动分析
500x240 - 12KB - JPEG
【CMJR-490四关节码垛机器人(90kg)】
918x648 - 176KB - JPEG

直角坐标机器人在铝锭码垛机上的应用
300x354 - 14KB - JPEG
一种四自由度码垛机器人机构和运动分析
548x249 - 59KB - JPEG
一种四自由度码垛机器人机构和运动分析-国际
525x237 - 20KB - JPEG

四自由度码垛机器人机构和运动分析 -嵌入式-电
500x226 - 11KB - JPEG

四自由度码垛机器人机构和运动分析 -嵌入式-电
500x225 - 17KB - JPEG

四自由度码垛机器人机构和运动分析 -嵌入式-电
266x283 - 19KB - JPEG
四自由度码垛机器人机构和运动分析 - 伺服与控
266x283 - 23KB - JPEG
