路径规划算法_局部路径规划算法
浅谈路径规划算法 2017年09月19日 16:32:09 Andrew_GuSD阅读数:59623 原文地址: 1 导言 移动一个简单的物体(object)看起来是容易的。而路径搜索是复杂的。为什么涉及
将导致规划算法计算量较大。基于随机采样技术的PRM法可以有效解决高维空间和复杂约束中的路径规划问题。 PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,
传统的路径规划算法有人工势场法、模糊规则法、遗传算法、神经网络、模拟退火算法、蚁群优化算法等。但这些方法都需要在一个确定的空间内对障碍物进行建模,计算复杂
Introduction to Autonomous Mobile Robots 中关于路径规划的内容 第一步将可能的连续的环境模型装换成适应于所选路径规划算法的离散图,有三种通用的策略:道路图、单位分
简介:路径规划是指,在具有障碍物的环境中,按照一定的评价标准,寻找一条从起始状态到目标状态的无碰撞路径。
ethz 开源的一个路径规划算法库 需要的是里程计tf坐标变换和3d点云数据,计算下个位置的gain,这个gain也考虑了octomap中格子的概率,考虑的是看到还没有mapped的格子 ,尽
路径规划算法 天瀑cqj上传于2011-05-16|暂无评价|0|0|简介|举报 路径规划 阅读已结束,下载文档到电脑 1下载券 下载 想免费下载本文?立即加入VIP 免下载券下载文档 10万篇精
给每一个AGV小车规划一条最优路径,对比了Bellman-Ford算法、SPFA算法、Dijkstra算法、Floyd算法和A*算法的优缺点,最终确定了使用A*算法作为路径规划算法。 下面总结
路径规划算法仅仅是路径规划的一小部分,找到能满足需求的算法就可以了。 以下代码是我在做一个室内导航时,利用Dijkstra算法,做一个路径规划的试验。 当时对Java不熟悉,代
Dijkstra 算法是一种用于计算带权有向图中单源最短路径(SSSP:Single-Source Shortes Floyd-Warshall算法采用了动态规划思想,时间复杂度为$O(N^3)$,空间复杂度为$O(N^2)

基于未知环境下改进的RRT路径规划算法 - 传动
550x377 - 44KB - JPEG
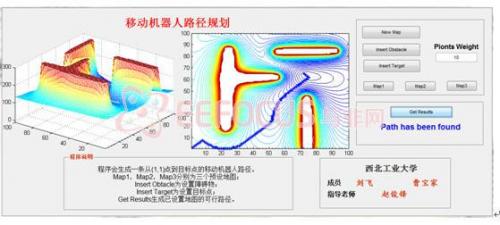
移动机器人路径规划算法研究及仿真平台的设计
500x225 - 21KB - JPEG

自动驾驶想要更安全 路径规划算法很重要
550x315 - 14KB - JPEG

自动驾驶想要更安全 路径规划算法很重要
549x372 - 35KB - JPEG

自动驾驶想要更安全 路径规划算法很重要
431x224 - 10KB - JPEG

基于广义CAD模型的汽车产品拆卸规划_CAD_
360x509 - 36KB - JPEG

几何方法的人员疏散多威胁规避路径规划算法
800x1168 - 383KB - PNG

机器人路径规划算法的研究.pdf
800x1132 - 295KB - PNG

移动机器人全覆盖路径规划算法综述_word文档
1449x2004 - 738KB - PNG

清洁机器人全覆盖路径规划算法综述._word文档
1447x2030 - 945KB - PNG
图论动态规划算法--Floyd最短路径
394x422 - 23KB - JPEG

基于遗传算法的机器人路径规划MATLAB源码.
993x1404 - 66KB - PNG

Dijkstra算法在移动机器人路径规划和避障中的
800x1102 - 441KB - PNG

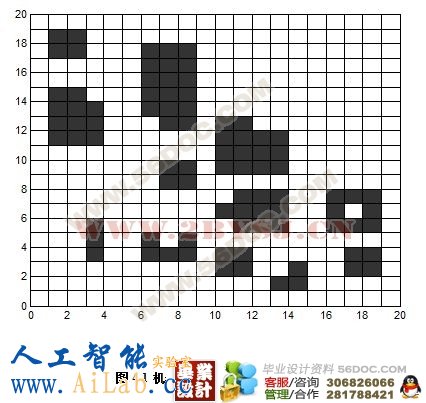
基于栅格法的机器人路径规划蚁群算法
773x1545 - 21KB - PNG
基于蚁群算法的机器人路径规划(附仿真程序)☆
426x403 - 48KB - JPEG